

【睿尔曼-RealMan】睿尔曼超轻量仿人机械臂--ROS2 使用说明
Forrest 2023-12-14
1.package 概览
该文档将总体介绍机械臂基于 ROS2 的功能包,主要作用为帮助大家实现,两个目的。
1. 了解 ROS2 的功能包作用。
2. 掌握当前 ROS 包的使用方式。
源码地址:https://github.com/RealManRobot/ros2_rm_robot.git。
下面为功能包的总体介绍
1. 安装与环境配置(rm_install)
2. 硬件驱动(rm_driver)
3. 启动(rm_bringup)
4. 模型描述(rm_description)
5. ROS 消息接口(rm_ros_interfaces)
6. Moveit2 配置(rm_moveit_config)
7. Moveit2 与硬件驱动通信连接(rm_config)
8. Gazebo 仿真机械臂控制(rm_gazebo)
9. 使用案例(rm_examples)
10. 技术文档(rm_docs)
2. rm_driver 功能包介绍
2.1 rm_driver 功能包作用
(1)与机械臂通过 API 函数建立连接,机器人默认 IP 地址:192.168.1.18,请保证上位机的 IP 在同一局域网内,使用 ROS2 控制机械臂,请务必确认机械臂处于以太网口通信模式;
(2)机械臂的底层驱动程序,订阅和发布各 topic 数据,更新 RVIZ 内机械臂各关节角度。
2.2 rm_driver 功能包使用方式
实际使用该节点时需要在终端中输入以下指令。
ros2 launch rm_driver rm__driver.launch.py
在实际使用时需要将以上的更换为实际的机械臂型号,可选择的机械臂型号有 65、63、eco65、75。例如使用的机械臂为 65 系列,则使用如下指令启动该节点。
ros2 launch rm_driver rm_65_driver.launch.py
关于该功能包更详细的介绍请参考该功能包的详细说明文档。
3. rm_description 功能包介绍
3.1 rm_description 功能包作用
(1)RM65-B、RM63-B、RMeco65-B、RM75-B 机器人描述功能包,提供创建好的机器人模型和配置文件。
(2)通过 rm_65.urdf、rml_63.urdf、rm_eco65.urdf、rm_75.urdf 机器人模型文件提供规划好的 TF 变换。
3.2 rm_description 功能包使用方式
实际使用该节点时需要在终端中输入以下指令。
ros2 launch rm_description rm__display.launch.py
在实际使用时需要将以上的更换为实际的机械臂型号,可选择的机械臂型号有 65、63、eco65、75。
例如使用的机械臂为 65 系列,则使用如下指令启动该节点。
ros2 launch rm_description rm_65_display.launch.py
启动成功后继续启动 rm_driver 节点。
ros2 launch rm_driver rm__driver.launch.py
之后启动 rviz2 节点。
rviz2
可以调用之前设计好的 rviz 配置文件直接加载模型。
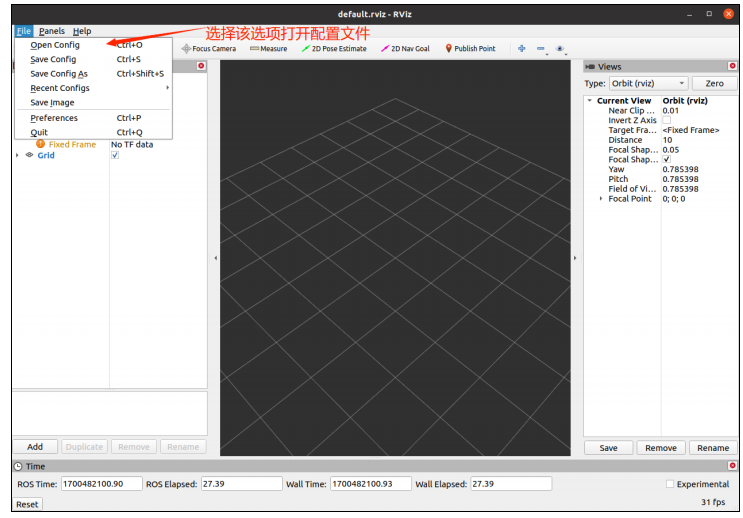
在功能包的 rviz 文件夹下找到对应的配置文件。
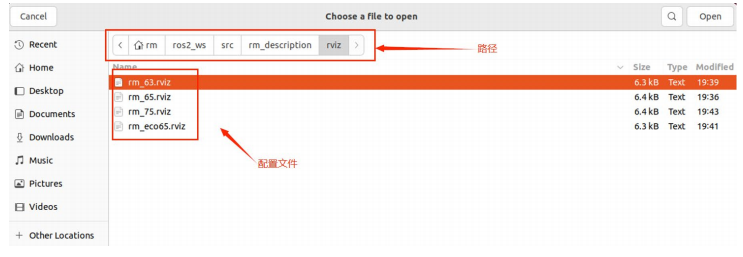
我们可以在 rviz2 的界面中调出机械臂模型进行查看,且机械臂的位姿与实际机械臂相同。
4. rm_ros_interfaces 功能包介绍
4.1 rm_ros_interfaces 功能包作用
(1)RM65、RM63、RMECO65、RM75 所用到的所有控制消息和状态消息。
4.2 rm_ros_interfaces 功能包使用方式
该功能包主要为其它功能包提供启动运行需要的消息文件,并不执行任何指
令。
5. rm_control 功能包介绍
5.1 rm_control 功能包作用
(1)提供一个与 moveit2 对接的动作,为 moveit2 实现真实机械臂的控制提供通信桥梁。
(2)机器人控制器,将 Moveit 规划的机械臂轨迹,通过三次样条插值细分,按照 20ms 的控制周期发给 rm_driver 节点。
5.2 rm_control 功能包使用方式
实际使用该节点时需要在终端中输入以下指令。
ros2 launch rm_control rm__control.launch.py
该节点本身并不实现具体可见的功能,需要配合 rm_moveit2_config 功能包的相关功能进行使用。
6. rm_moveit2_config 文件介绍
6.1 rm_moveit2_config 文件作用
(1)使用 Setup Assistant 工具根据机械臂 URDF 模型 rm_65.urdf 创建生成的一个 MoveIt2 配置的功能包,它包含了大部分 MoveIt2 启动所需的配置文件和启动文件,以及包含一个简单的演示 demo。
(2)根据机械臂特性对演示 demo 进行改写,配合 rm_control 和 rm_driver功能包实现真实机械臂的控制功能。
6.2 rm_moveit2_config 文件使用方式
该功能包可实现虚拟机械臂的规划控制演示,通过以下指令进行实现。
ros2 launch rm__config demo.launch.py
在实际使用时需要将以上的更换为实际的机械臂型号,可选择的机械臂型号有 65、63、eco65、75。
例如使用的机械臂为 65 系列,则使用如下指令启动该节点。
ros2 launch rm_65_config demo.launch.py
启动成功后可以通过拖动的方式控制机械臂。
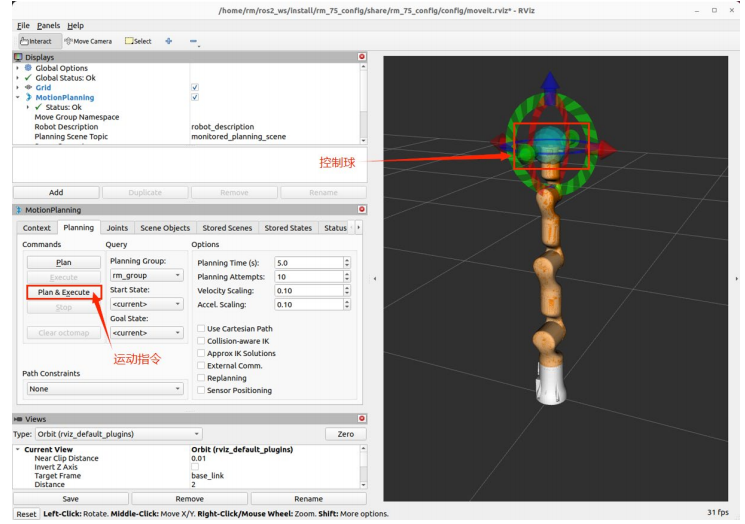
该功能包可实现真实机械臂的规划控制,通过以下指令进行实现。
ros2 launch rm_driver rm__driver.launch.py ros2 launch rm_description rm__display.launch.py ros2 launch rm_control rm__control.launch.py ros2 launch rm__config real_moveit_demo.launch.py
在 rviz2 中会出现机械臂 moveit2 规划的相关信息,我们可以通过拖动控制球的方式控制真实机械臂。
7. rm_bringup 功能包介绍
7.1 rm_bringup 功能包作用
(1)实现机械臂复杂启动指令的集成,可通过一个 launch 文件,实现多节点配合的复杂功能。
7.2 rm_bringup 功能包使用方式
实际使用该节点时需要在终端中输入以下指令,直接启动 moveit2 实现moveit2 对真实机械臂的控制。
ros2 launch rm_bringup rm__bringup.launch.py
在实际使用时需要将以上的更换为实际的机械臂型号,可选择的机械臂型号有 65、63、eco65、75。
例如使用的机械臂为 65 系列,则使用如下指令启动该节点。
ros2 launch rm_bringup rm_65_bringup.launch.py
实际使用该节点时需要在终端中输入以下指令,直接启动 gazebo 实现moveit2 对仿真机械臂的控制。
ros2 launch rm_bringup rm__gazebo.launch.py
在实际使用时需要将以上的更换为实际的机械臂型号,可选择的机械臂型号有 65、63、eco65、75。
例如使用的机械臂为 65 系列,则使用如下指令启动该节点。
ros2 launch rm_bringup rm_65_gazebo.launch.py
有关该功能包更详细的介绍请参考《ROS2机械臂rm_bringup功能包详解》。
8. rm_gazebo 功能包介绍
8.1 rm_gazebo 功能包作用
(1)实现仿真机械臂控制,在没有机械臂实体,而且想要使用 Moveit2 进行机械臂规划并查看机械臂运动轨迹时可以使用。
8.2 rm_gazebo 功能包使用方式
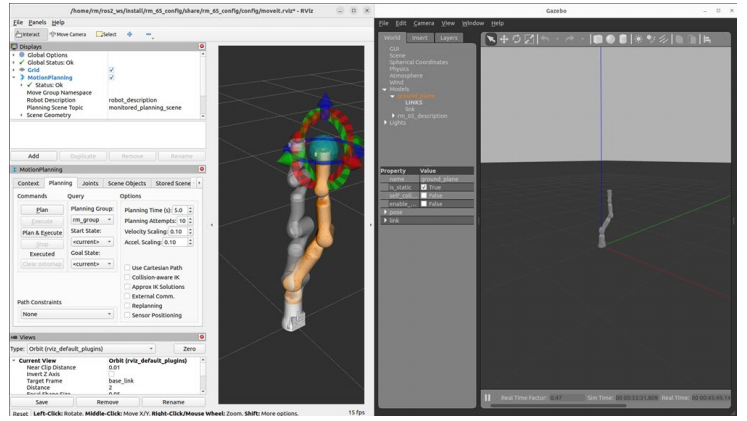
实际使用该节点时需要在终端中输入以下指令,启动 gazebo 仿真和moveit2 实现 moveit2 对仿真机械臂的控制,指令如下。
ros2 launch rm_gazebo gazebo__demo.launch.py ros2 launch rm__config gazebo_moveit_demo.launch.py
在实际使用时需要将以上的更换为实际的机械臂型号,可选择的机械臂型号有 65、63、eco65、75。
启动成功后,界面将出现如下画面。
关于该功能包更详细的介绍请参考该功能包的详细说明文档。
9. rm_example 功能包介绍
9.1 rm_example 功能包作用
(1)实现机械臂一些常用功能的使用和代码开发,主要包含更换工作坐标系、获得机械臂当前状态、moveJ 角度规划运动、moveJP 位姿规划运动、moveL直线运动。
9.2 rm_example 功能包使用方式
1.更换工作坐标系。
更换机械臂当前的工作坐标系,需要执行以下两条指令实现该功能。
ros2 launch rm_driver rm__driver.launch.py ros2 run rm_example rm_change_work_frame
在实际使用时需要将以上的更换为实际的机械臂型号,可选择的机械臂型号有 65、63、eco65、75。
运行成功后,终端将出现如下语句。

2. 得到当前的机械臂状态信息。
获得机械臂当前状态,需要执行以下两条指令实现该功能。
ros2 launch rm_driver rm__driver.launch.py ros2 run rm_example rm_get_state
在实际使用时需要将以上的更换为实际的机械臂型号,可选择的机械臂型号有 65、63、eco65、75。
运行成功后,终端将出现如下语句。

3. 机械臂 MoveJ 运动。
控制机械臂进行关节运动,需要执行以下两条指令实现该功能。
ros2 launch rm_driver rm__driver.launch.py ros2 launch rm_example rm__movej.launch.py
在实际使用时需要将以上的更换为实际的机械臂型号,可选择的机械臂型号有 65、63、eco65、75。
dof 代表机械当前的自由度信息,可以选的参数有 6dof 和 7dof。例如启动 7 轴的机械臂时需要使用如下指令。
ros2 launch rm_example rm_7dof_movej.launch.py
运行成功后,终端将出现如下语句。

4. 机械臂 MoveJ_P 运动。
控制机械臂进行 MoveJ_P 关节运动,需要执行以下两条指令实现该功能。
ros2 launch rm_driver rm__driver.launch.py ros2 run rm_example movejp_demo
在实际使用时需要将以上的更换为实际的机械臂型号,可选择的机械臂型号有 65、63、eco65、75。
运行成功后,终端将出现如下语句。

5. 机械臂 MoveL 运动。
控制机械臂进行 MoveL 关节运动,需要执行以下两条指令实现该功能。
ros2 launch rm_driver rm__driver.launch.py ros2 run rm_example movel_demo
在实际使用时需要将以上的更换为实际的机械臂型号,可选择
的机械臂型号有 65、63、eco65、75。运行成功后,终端将出现如下语句。

10. rm_doc 功能包介绍
10.1 rm_doc 功能包作用
(1)rm_doc 为文档介绍功能包,主要包括各个功能包的介绍文档和使用方
式的文档。
11. rm_install 功能包介绍
11.1 rm_install 功能包作用
(1)rm_install 为安装介绍功能包,主要包含三个脚本 1.ROS2 安装脚本ros2_install.sh;2.moveit2 安装脚本 moveit2_install.sh;3.功能包安装脚本lib_install.sh,和一个安装说明的文档《睿尔曼 l ROS2 机械臂 rm_install 包详解V1.0》,在实际使用时需要参考该文档进行脚本使用。
附件下载
0 条评论




撰写评论