

【睿尔曼-RealMan】使用机械臂MODBUS-TCP控制其他外设
Forrest 2024-08-19
【睿尔曼-RealMan】
以XX焊机为例
其通讯协议为:
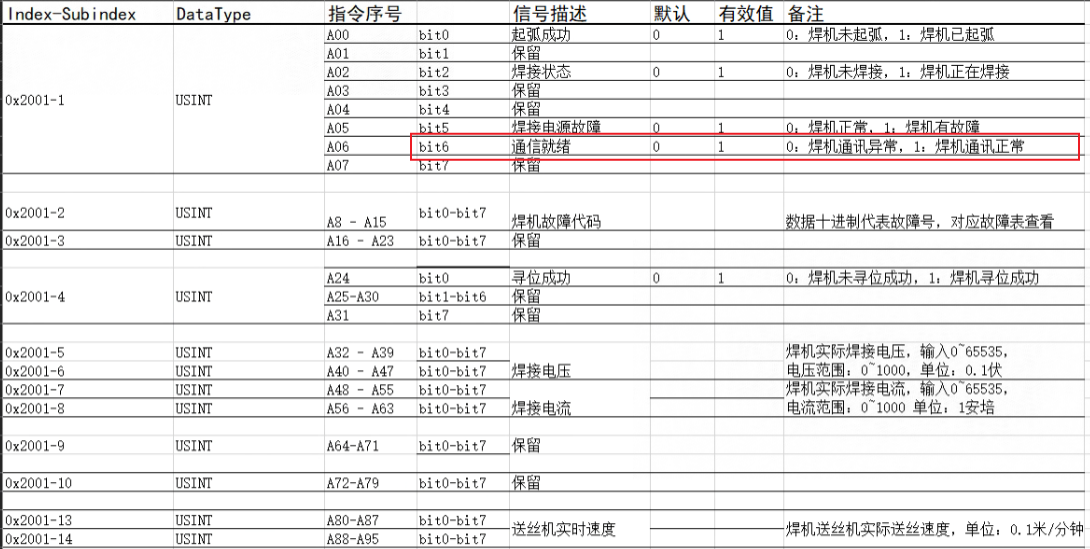
使用MODBUS-CAN32软件可以读到寄存器信息
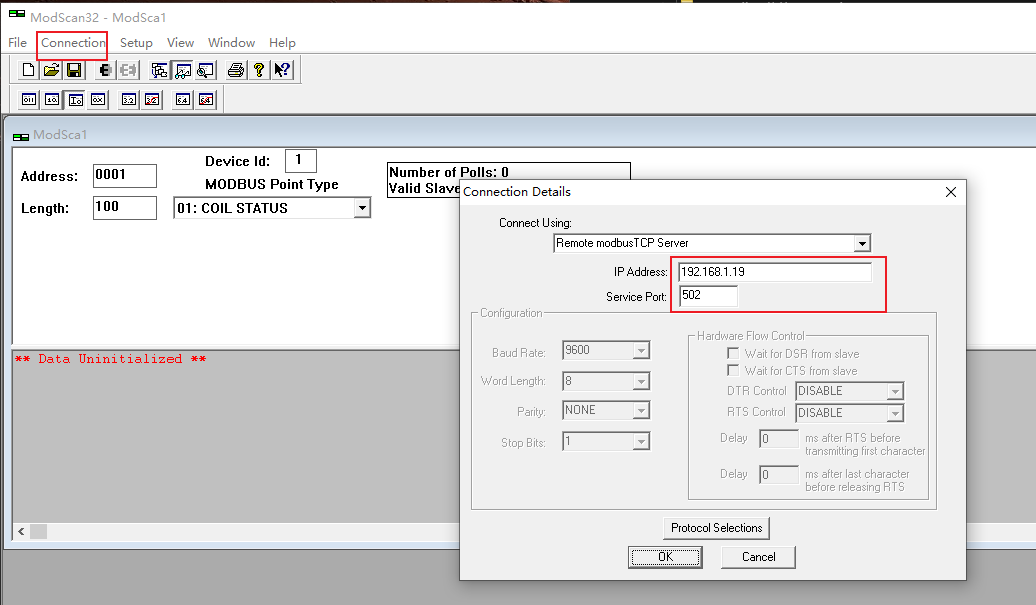
操作步骤为:
1.建立通讯
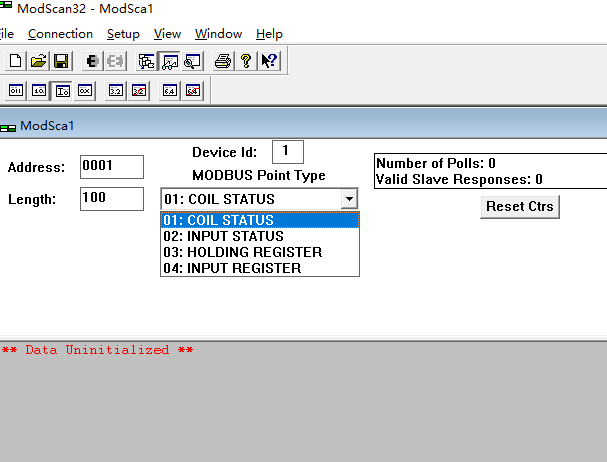
2.选择寄存器类型
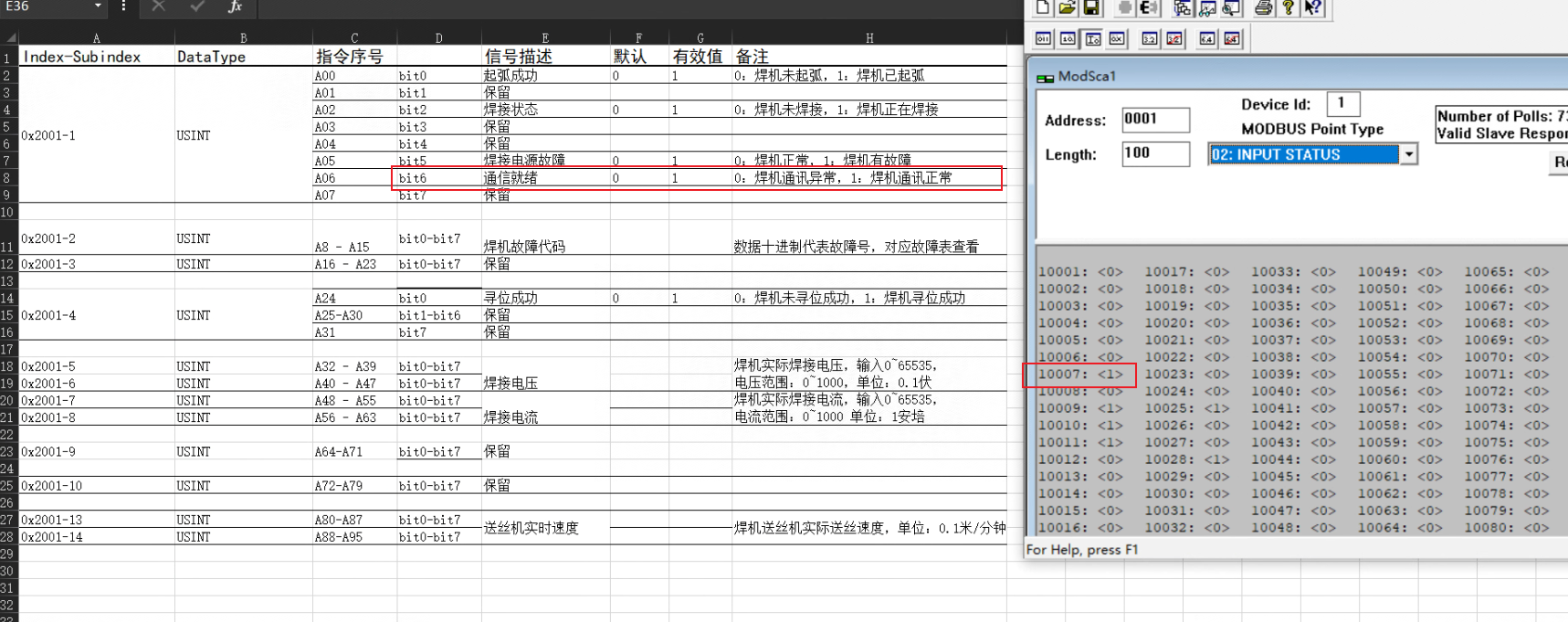
3.对比数据
使用机械臂进行读写操作
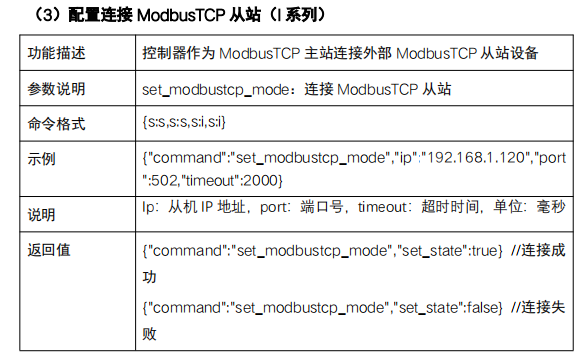
1.建立MODBUS-TCP从站连接
{"command":"set_modbustcp_mode","ip":"192.168.1.19","port":502,"timeout":2000}
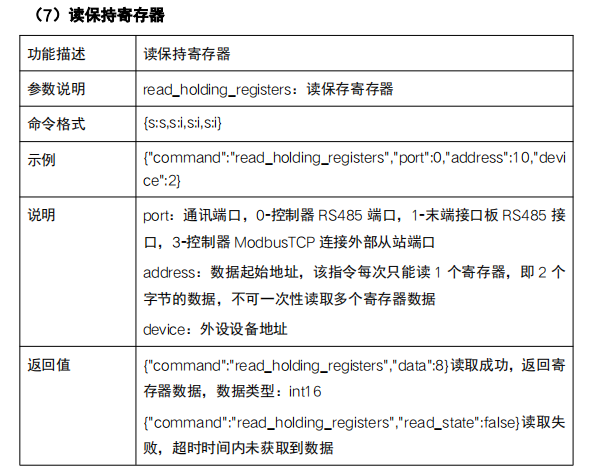
2.读寄存器
{"command":"read_holding_registers","port":3,"address":1,"device":502}
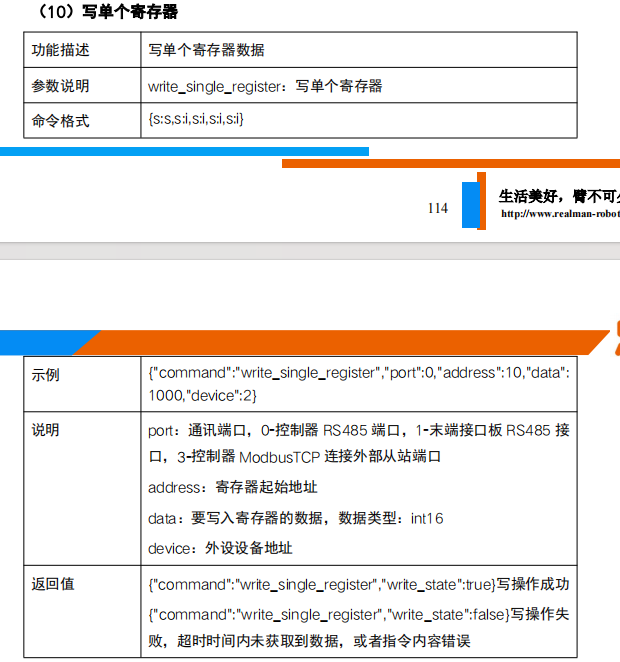
3.写寄存器
{"command":"write_single_register","port":3,"address":1,"data":1000,"device":502}
0 条评论




撰写评论