

【睿尔曼-RealMan】虚拟墙的设置方法及注意事项
l 2024-08-02
【睿尔曼-RealMan】
虚拟墙,将机械臂拖动示教的运动范围限制在墙内,虚拟墙作用于机械臂整体,当拖动机械臂,机械臂的某一部分碰到墙体并要超出墙体限制时,会感受到阻力,并且机械臂将无法向冲出墙体的方向运动。虚拟墙功能支持在电流环拖动示教与力控拖动示教两种模式下,对拖动范围进行精确限制。在这两种特定的示教模式下,用户可以借助虚拟墙功能,确保机械臂的拖动操作不会超出预设的范围。但请务必注意,虚拟墙功能目前支持长方体和球体两种形状,并仅在上述两种示教模式下有效。在其他操作模式下,此功能将自动失效。因此,请确保在正确的操作模式下使用虚拟墙功能,以充分发挥其限制拖动范围的作用。
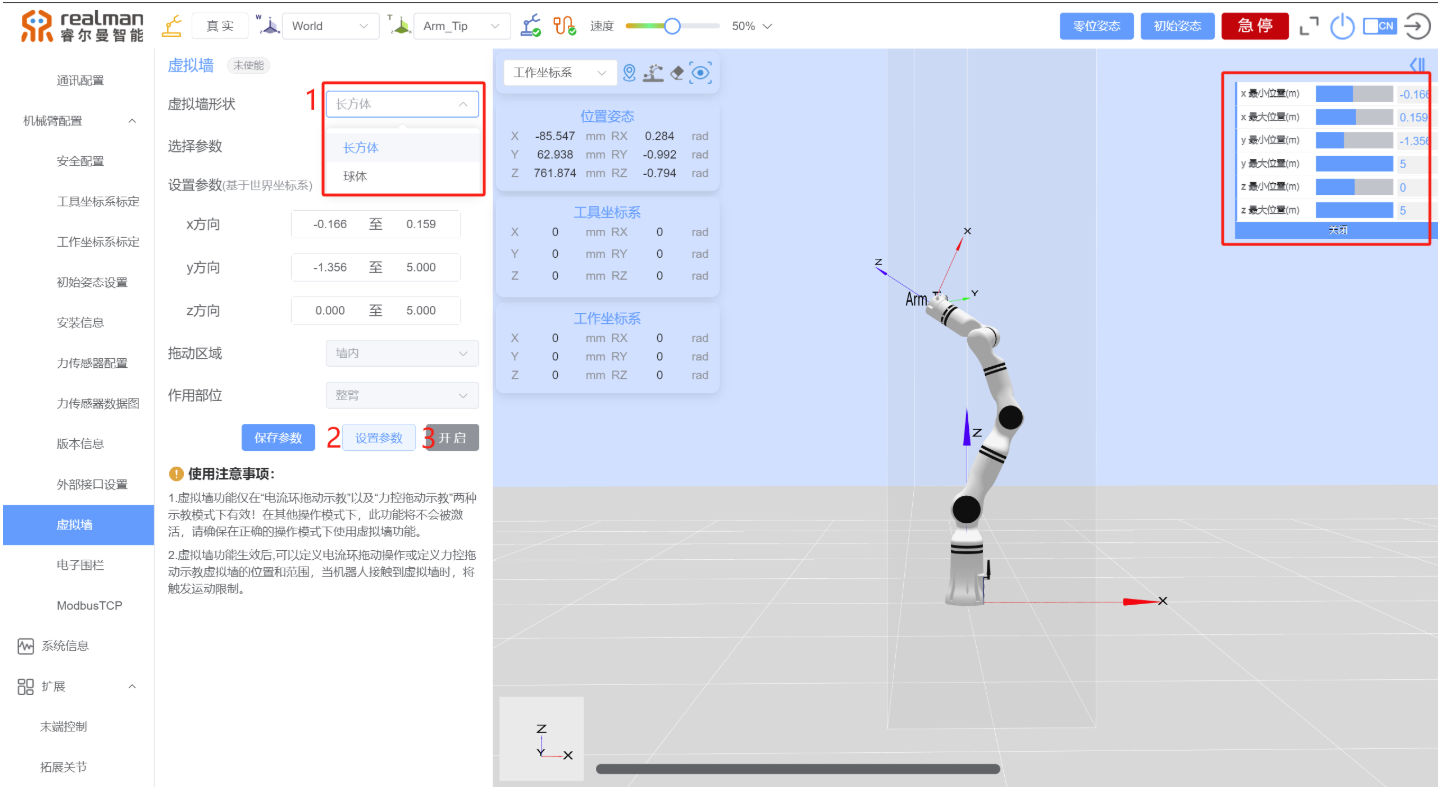
设置方法:1.示教器->配置->机械臂配置->虚拟墙。目前虚拟墙形状支持长方体和球体,参数部分,x,y,z均基于世界坐标系,单位0.001m,范围是-5~+5(m)。
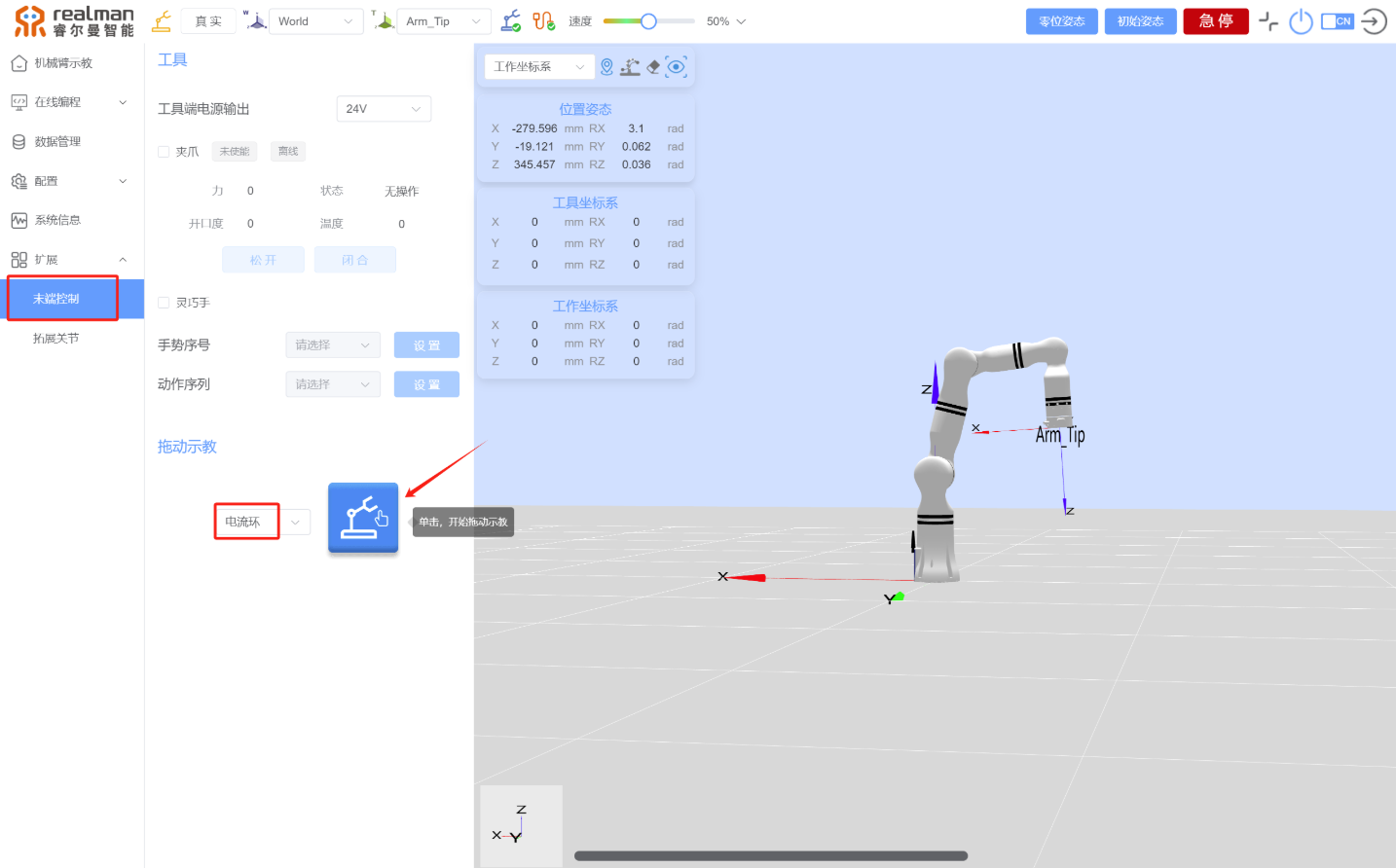
虚拟墙设置完成后,需进入扩展-末端控制-开启电流环模式,此时虚拟墙有效,拖动机械臂时,可以感受到机械臂的运动被限制在墙内。
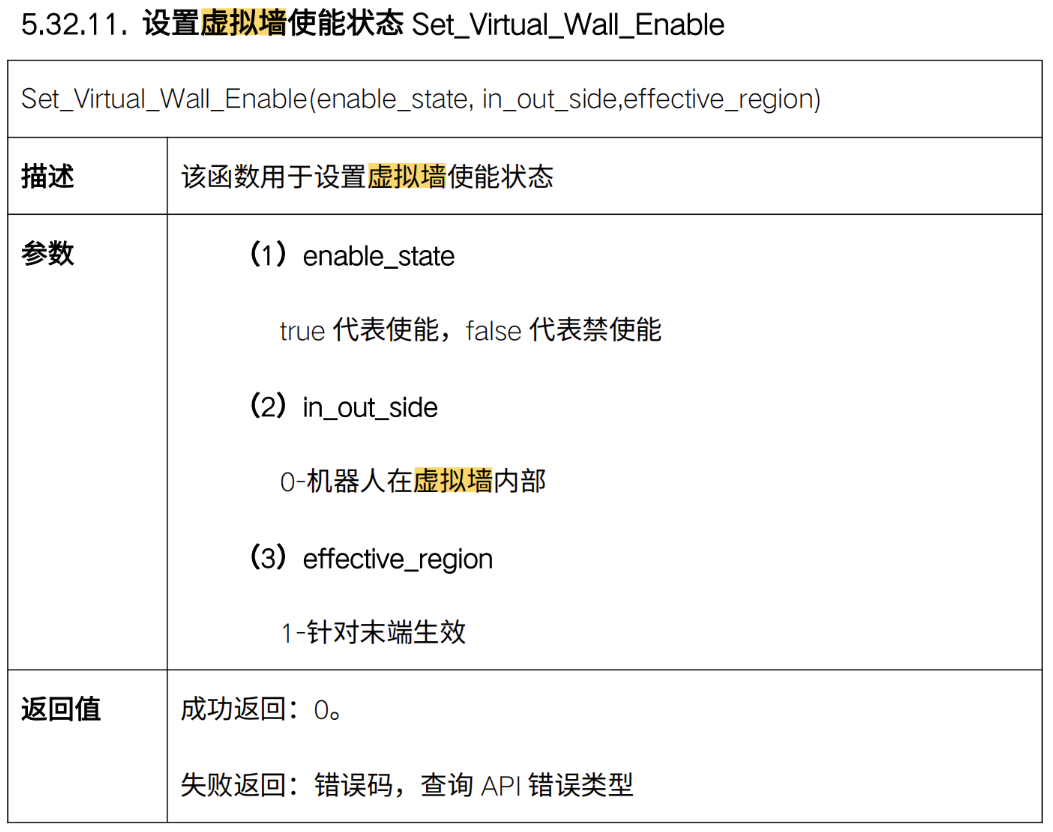
2. 使用api设置。
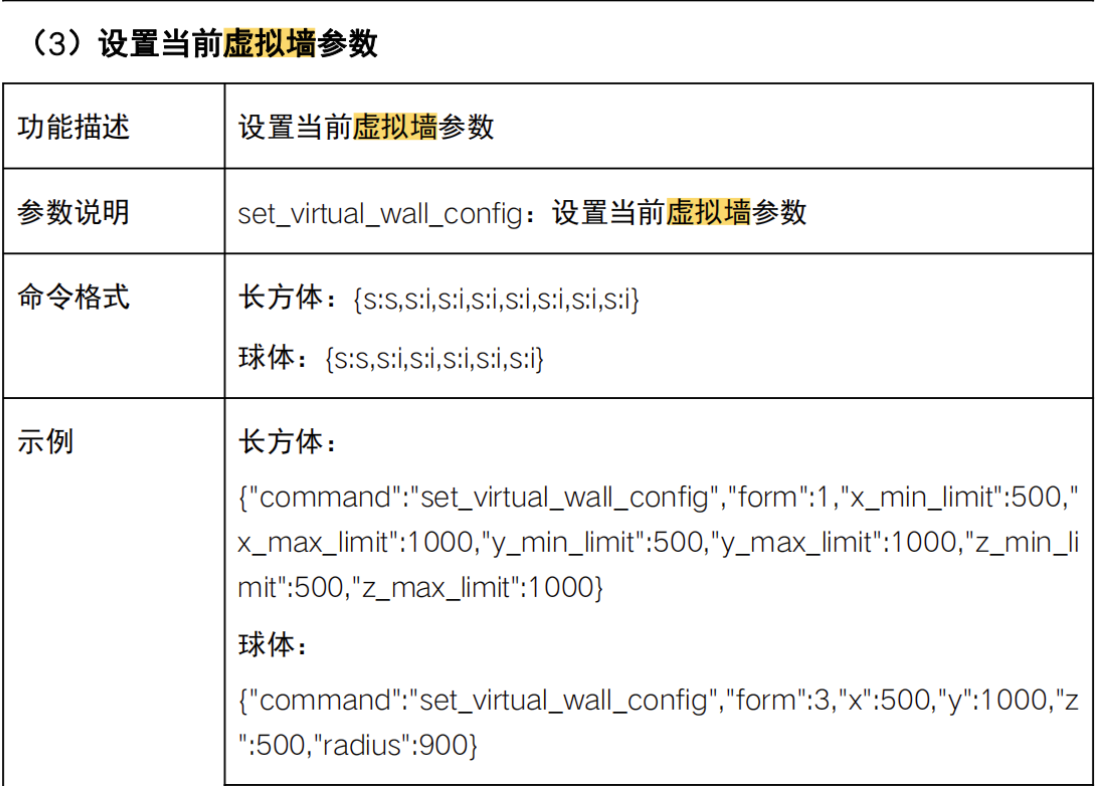
3.使用json下发设置虚拟墙的指令。
在使用虚拟墙功能时,应注意以下几点:1. 适用模式:虚拟墙功能仅在电流环拖动示教与力控拖动示教两种特定模式下有效,可以对拖动范围进行精确限制。2. 形状限制:当前虚拟墙支持的形状有限,仅包括长方体和球体两种。3. 功能失效条件:在非指定的示教模式下,虚拟墙功能将自动失效,因此需确保在正确的操作模式下使用,以发挥其作用。
0 条评论




撰写评论