

【睿尔曼-RealMan】机械臂之示教器图形化编程中的全局路点与局部路点
l 2024-07-11
【睿尔曼-RealMan】
全局
路点与局部路点的区别:
全局路点:保存至机械臂控制器中,不会随编程文件的更新修改而变化;并且可在多个编程文件中调用。
局部路点:保存至编程文件中,若文件未保存,点位会丢失;只可在当前文件中调用。
点位新增方式:1.图形化编程右边栏可进行关节角度、位姿编辑,编辑好点位后点击“新增点位”;在弹出的窗口中写入点位名称;此时增加的点位是局部点位。

2.点击下方黑色长条,出现点位信息栏,点击“更新至全局点位”,该点位则既是局部点位也是全局点位。

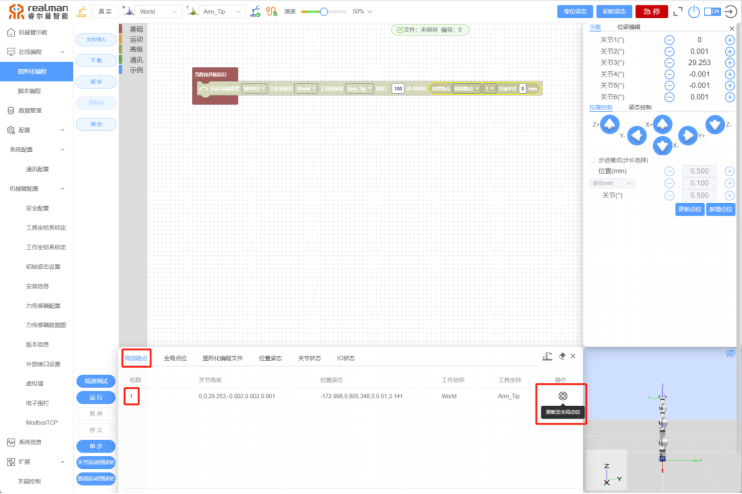
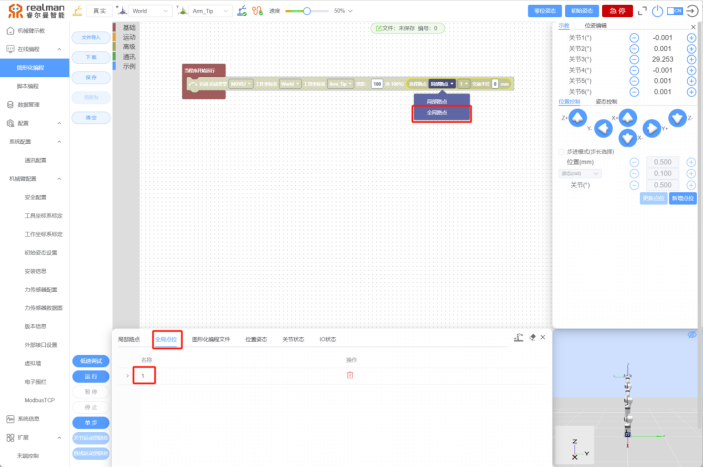
3.此时可发现点位1既在局部路点中,也在全局路点中。在下方的点位信息栏中点击该点,可在右侧的点位信息栏中查看此点的关节角度和位姿信息,并可进行更新,点击“更新点位”则该点位信息更新成功。
4.在图形化编程界面将点位1选择为全局路点,并保存编程文件。此文件和路点将保存至机械臂控制器中。

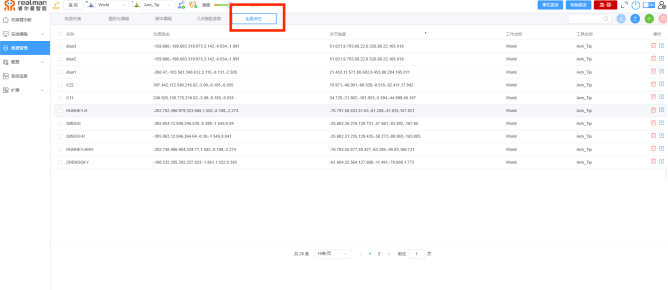
5.进入数据管理页面,可看到全局路点的信息(局部点位则无法保存在此处),点击右侧的 ,可对该点进行编辑。
,可对该点进行编辑。
0 条评论




撰写评论