

【睿尔曼-RealMan】基于python的机械臂正逆解接口函数调用例程
l 2024-06-17
一、连接机械臂时调用正逆解接口:
1.正解函数定义(调用时无需关注)
def Algo_Forward_Kinematics(cls, joint): """ brief Algo_Forward_Kinematics 正解函数 param joint 关节1到关节7角度 单位° return Pose 目标位姿 """ cls.pDll.Algo_Forward_Kinematics.restype = Pose joint = (ctypes.c_float * 7)(*joint) Pose_ = cls.pDll.Algo_Forward_Kinematics(joint) position = Pose_.position euler = Pose_.euler pose = [position.x, position.y, position.z, euler.rx, euler.ry, euler.rz] return pose |
|---|
2.函数调用
(1)导入对应的库文件;
| from robotic_arm_package.robotic_arm import * import sys |
|---|
(2)调用正解函数
| def demo(robot): #自定义函数,传入'robot' |
|---|
在进行正逆解之前,需要先获取机械臂的当前状态,机械臂安装角度、工作坐标系等。
| ret1 =robot.Get_Install_Pose() if ret1 != 0: print("当前机械臂安装角度" + str(ret1)) sys.exit() ret2 =robot.Get_Current_Work_Frame() if ret2 != 0: print("当前机械臂工作坐标系" + str(ret2)) sys.exit() |
|---|
正解:由机械臂关节角度转换到位姿的过程。
输入关节角度,例:
| joint = [0, 0, -90, 0, -90, 0] |
|---|
将参数传入正解函数,并输出正解结果:
| # 正解 compute_pose = Arm.Algo_Forward_Kinematics(joint) print(f'正解结果:{compute_pose}') |
|---|
逆解:由位姿转换成机械臂的关节角度的过程。
| Algo_Inverse_Kinematics(q_in, q_pose, flag) |
|---|
q_in为上一时刻的关节角;
q_out为位姿参数,即x,y,z,rx,ry,rz,注意单位,x,y,z的单位是米,rx,ry,rz的单位是弧度;
flag代表姿态参数类别,0为四元数,1为欧拉角。
| # 逆解 compute_pose =[0.210,0,0.324,3.141,0,0] res = Arm.Algo_Inverse_Kinematics(joint, compute_pose, 1) print(f'逆解:{res}') |
|---|
(3)主函数调用
注册回调函数 mcallback (目前I系列不会调用此接口)
| if __name__ == "__main__": def mcallback(data): print('0') # 连接机械臂,注册回调函数 callback = CANFD_Callback(mcallback) robot = Arm(RM65, "192.168.1.18", callback) # API版本信息 print(robot.API_Version()) # 运行示例 demo7(robot) time.sleep(10) #给一定时间,容许页面打印出正逆解结果 # 断开连接 robot.RM_API_UnInit() robot.Arm_Socket_Close() |
|---|
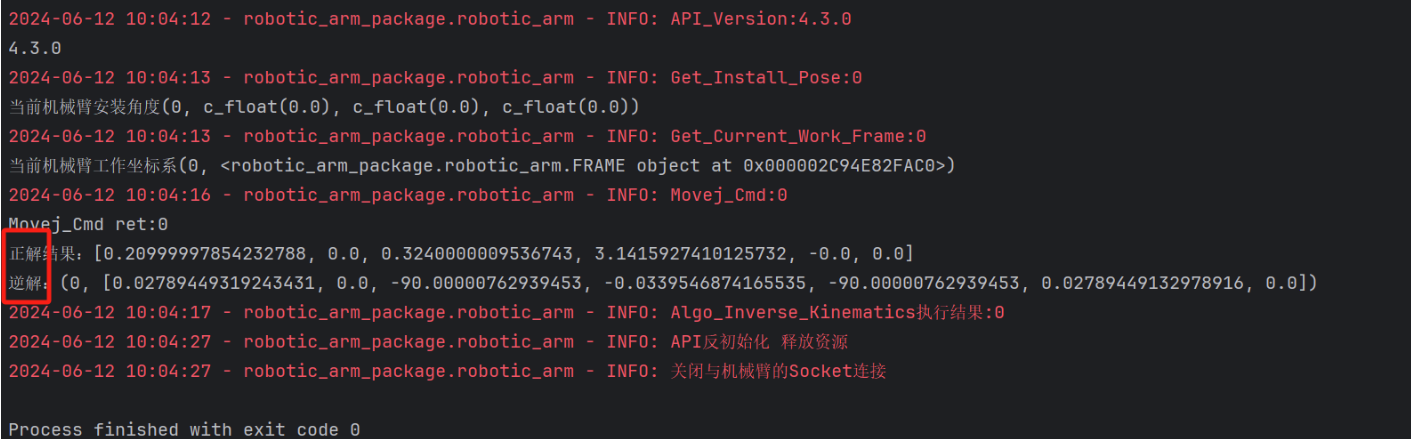
输出结果:
二、不连接机械臂时调用正逆解接口:
1. 在正逆解之前,需要先进行初始化算法依赖,即定义机械臂型号和传感器型号。
2. 需设置机械臂的安装角度和工作坐标系。
以RM65-B为例,进行正逆解接口调用。
| # 不连接机械臂的情况下,调用算法接口 dmode = RobotType.RM65 rbt_type = SensorType.B Arm.Algo_Init_Sys_Data(dmode, rbt_type) #定义机械臂型号为65-B # 设置算法的安装角度 Arm.Algo_Set_Angle(0, 0, 0) # 设置算法的工作坐标系 coord_work = FRAME() coord_work.frame_name.name = "123".encode() coord_work.pose.position.x = 0 coord_work.pose.position.y = 0 coord_work.pose.position.z = 0 coord_work.pose.euler.rx = 0 coord_work.pose.euler.ry = 0 coord_work.pose.euler.rz = 0 Arm.Algo_Set_WorkFrame(coord_work) curr_pose = Arm.Algo_Get_Curr_WorkFrame() print(f"当前工作坐标系:{curr_pose.frame_name.name, curr_pose.pose.position.x, curr_pose.pose.position.y, curr_pose.pose.position.z, curr_pose.pose.euler.rx, curr_pose.pose.euler.ry, curr_pose.pose.euler.rz}") # 计算正解结果 joint = [0, 0, 90, 0, 90, 0] compute_pose = Arm.Algo_Forward_Kinematics(joint) print(f'正解:{compute_pose}') # 计算逆解 tar = [0.210,0,0.324,3.141,0,0] q_in = [0, 0, 90, 0, 90, 0] q_out = Arm.Algo_Inverse_Kinematics(q_in, tar, 1) print(f'逆解·:{q_out}') # 断开连接 robot.RM_API_UnInit() robot.Arm_Socket_Close() |
|---|
0 条评论




撰写评论