

【睿尔曼-RealMan】睿尔曼复合机器人产品配件-底盘实训手册
Forrest 2024-04-30
睿尔曼复合机器人产品配件-底盘使用手册

一、底盘硬件介绍
机器人的移动底盘是用于支撑和驱动底盘移动的核心部件,它的设计和性能直接关系到机器人的移动能力、稳定性以及适应不同工作场景的能力。我司采用
的底盘具有稳定性、灵活性、自主性、较强的载荷能力、通用性等特点,能满足机器人在不同应用场景下的移动。以下是底盘的硬件介绍。
二、底盘开关机及充电
2.1电源总开关:
底盘底部带有电源总开关,位于底盘后⽅右侧万向轮旁边,⽤于断开电池电源。出⼚时默认关闭,首次使⽤时需要⼿动将开关拨动至打开状态。
当底盘存在长时间(超过一个月)不使⽤时,需要将电源总开关拨动⾄关闭状态,避免⻓时间不使⽤导致电池进⼊亏损状态。
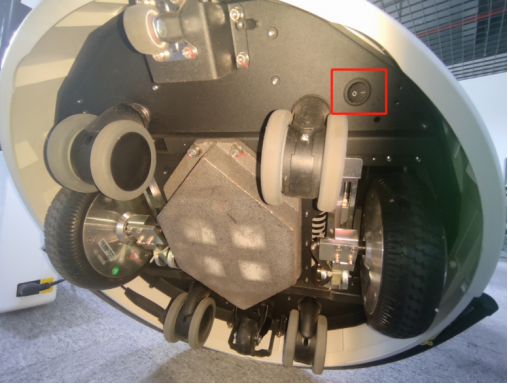
- 图 1 电源总开关
2.2开机
长按电源按钮,蜂鸣器短响两声,当第三声变长鸣后松开,等待底盘开机。
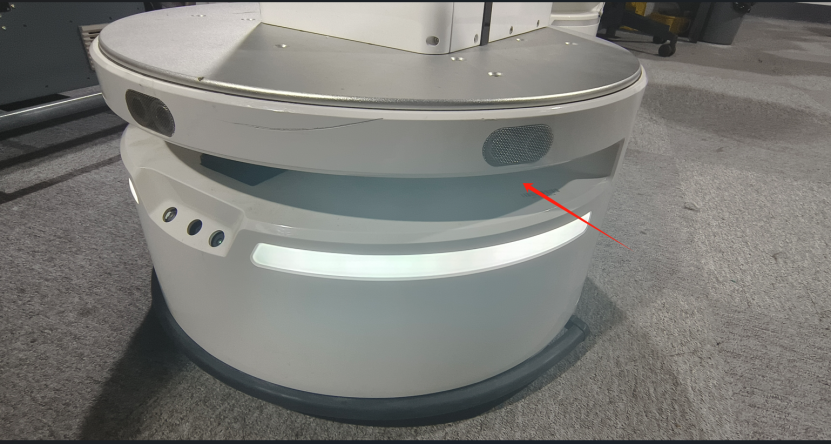
图 2 开关机键位置示意图
2.3底盘充电
2.3.1 充电桩摆放
充电桩需要依靠墙体摆放,且充电桩中⼼开始两侧各半⽶位置不能有其他物体。 充电桩需要放置在平整地面,不可以放在斜坡或地毯环境。 充电桩充电片高度需要与底盘上充电触点保持同一高度,若有误差,需要调节充电桩底部,适当增加或减少填充物。 充电桩摆放位置需要相对场景固定,避免后期因为⼈员搬动或者其他原因出现移动。可以在地面粘贴标识或通过双面胶进行固定。 同⼀场景下有多台底盘同时使⽤时,充电桩摆放距离不得少于1.5m。 确保充电桩摆放妥当后,通过电源线连接充电桩与电源,此时充电桩上会亮起绿色指示灯。
2.3.2手动充电
充电桩后方带有一米长手充线,在底盘右侧贴有竖型盖板,盖板采⽤磁吸固定,可以使用随机附赠的吸盘将其吸出,取出盖板后可以看到手充口。手动将线⼀端插头插在底盘端⼿充⼝即可,正常连接后,充电桩指示灯更换为红色。 使⽤充电线⼿动充电时,底盘不执⾏移动任务。在任务下发后任务会直接失败,注意在发送任务前取下⼿充线,并将底盘侧边盖板放回。
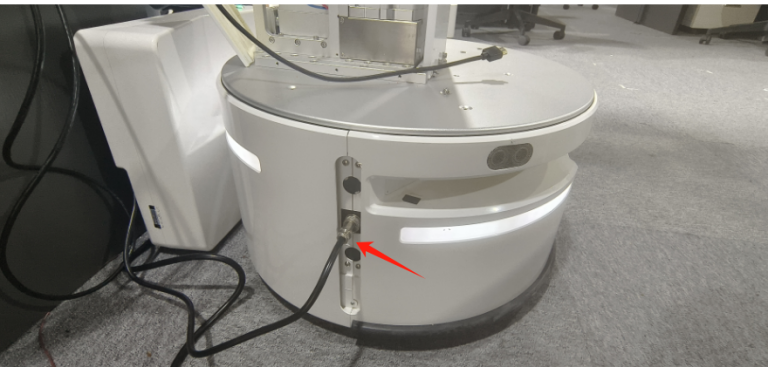
图 3 手动充电
2.3.3接触充电
充电桩位置固定后通过⼿动将底盘推动⾄充电桩,并使底盘下⽅充电触点与充电桩上的充电⽚接触,即可正常充电,正常接触后,充电桩指示灯更换为 红⾊。 地图正常且已标定充电桩点位时,可通过发送到充电桩点位任务,使底盘⾃动返回充电桩位置,且⾃动进⾏识别回充。
注:充电桩指示灯只有两种状态:
绿⾊:充电桩通电且未接触设备进⾏充电,充电桩在进⾏充电且底盘电量在90%以上;
红⾊:充电桩通电且接触设备进⾏通电,同时底盘电量⼩于90%。底盘在充电状态下,灯带会变为呼吸状态。关机充电时同样存在此现象,若底盘在充电桩上灯带没有变更为呼吸状态,请检查充电桩是否正常通电,底盘与充电桩是否正常接触。灯带状态参阅:1.3.4灯带状态。

图 4 充电桩指示灯
2.3.4 灯带状态
底盘灯带在不同阶段会有不同状态提示:
绿⾊闪烁: 电源开启,⼯控机启动中;
⽩⾊常亮: 开机完成及正常⼯作;
⽩⾊呼吸: 充电中;
⽩⾊闪烁: 急停按下。
三、工具使用
3.1 建立通讯:
3.1.1 无线连接方式:
底盘内置⽆线路由器,通过查看WiFi列表,选择以下WiFi名称。
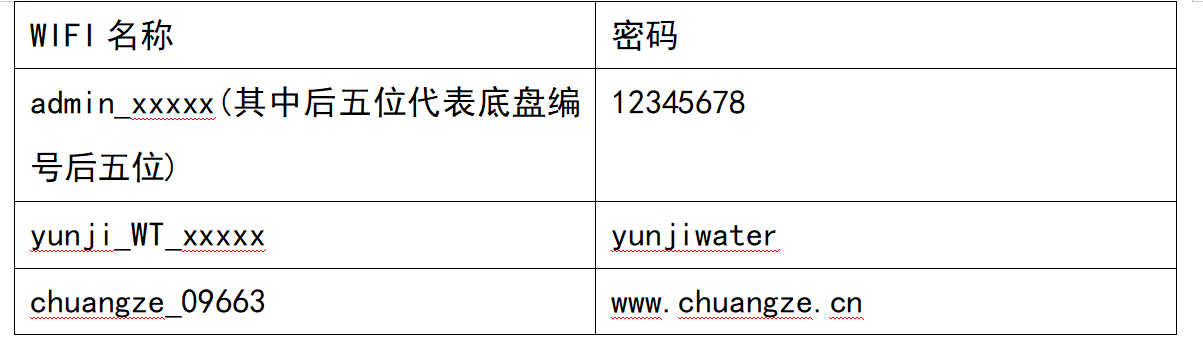
连上WiFi后即表示连接成功,同一底盘可以被多台设备同时连接。
3.1.2有线通讯-⽹线:
使⽤以太⽹⽹线,将底盘预留出的⽹⼝与控制设备进⾏连接,确保当前设备有线⽹卡没有被配置固定IP,等待电脑识别后即表示连接成功。
注:上述两种连接⽅案,选择⼀种进⾏连接即可。
3.2示教器页面:
使⽤Chrome浏览器,访问 192.168.10.10:9001,进入底盘的监控页面,访问后显示内容如图所示。
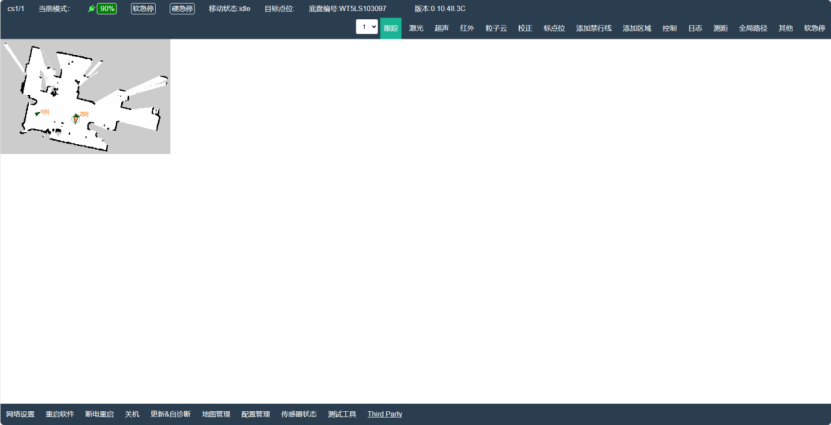
图 5 示教器主页面
监控⻚⾯左上⻆为状态栏,从左到右依次为:

图 6 状态栏
(1)地图名/楼层:当前底盘所使⽤的地图名称及楼层信息。若地图为云端共享,则后⾯会显示绿⾊括号,内部显示云端地图对应唯⼀ID编码;
(2)当前模式:监控⻚⾯当前选中的操作模式,分别为:矫正、标点位、禁⾏线、区域、控制;
(3)电量:当前底盘电量信息,同时会显示充电状态;
(4)软、硬急停状态:急停分为物理按键硬急停与软件控制软急停,两者单独控制,⽆法相互取消;
(5)移动状态:当前底盘任务状态;
(6)操作栏软件版本:当前底盘使⽤软件版本;
(7)底盘编号:当前设备唯⼀标识符。
3.3使用流程:
3.3.1控制底盘运动:
地图创建底盘在进行自主移动前,需要先针对现场环境进行地图创建。底盘需要边运动边对周围环境进行扫描,先点击页面上方菜单栏的“控制”键,便于在扫图过程中控制底盘进行运动。“控制键”按下后,可在键盘上通过‘i’(向前),‘k’(向后),‘j’(向左旋转),‘l’(向右旋转)四个按键对底盘进行运动控制。选中控制按钮后,可以直接在地图上可移动区域点击并拖动,底盘会开始移动任务向⽬标点开始移动。
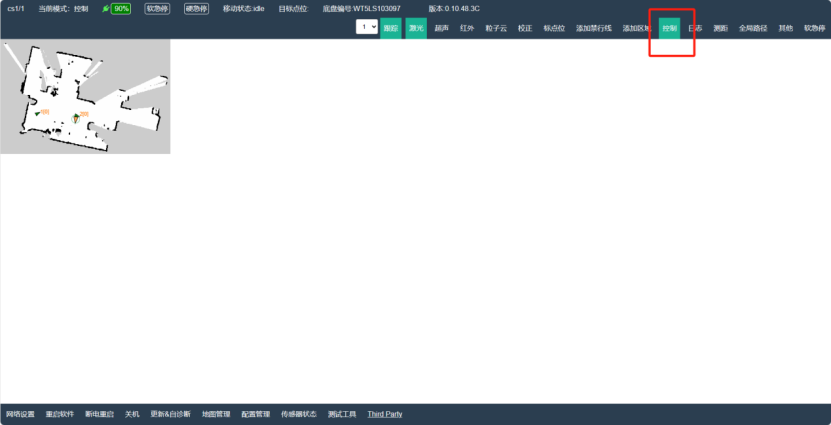
图 7 控制键
3.3.2 底盘配置管理
监控页面下方点击“配置管理”,可对底盘的直线速度、旋转速度等基础参数进行配置。
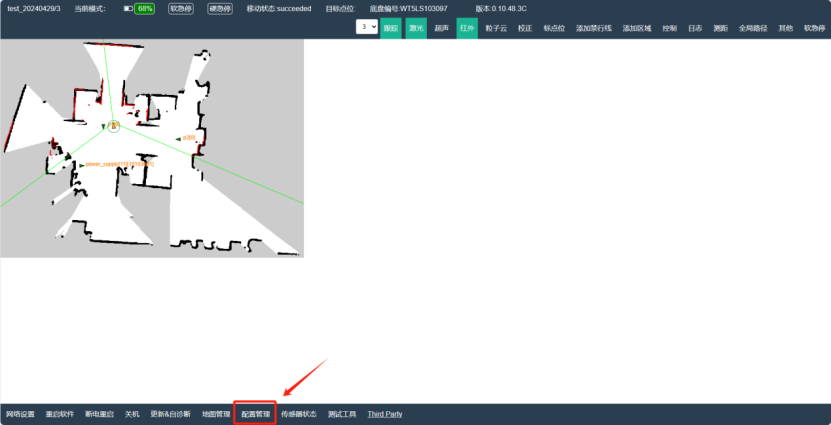
图 8 配置管理
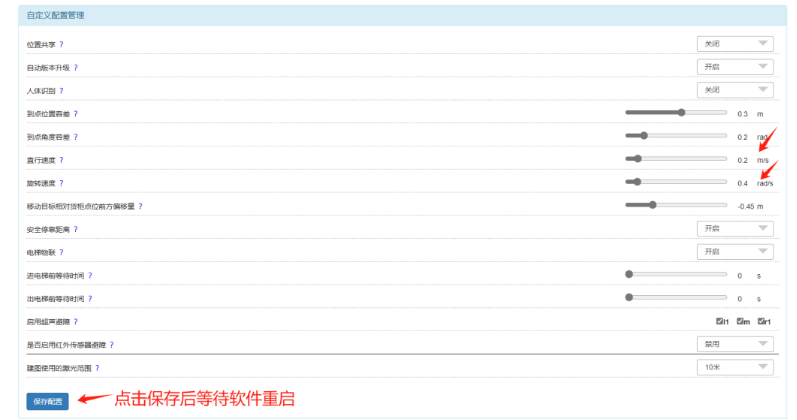
图 9 自定义底盘配置
3.3.3 创建地图
点击下方地图管理,选择“创建地图”,填写对应的地图名称及楼层后,开始创建地图。
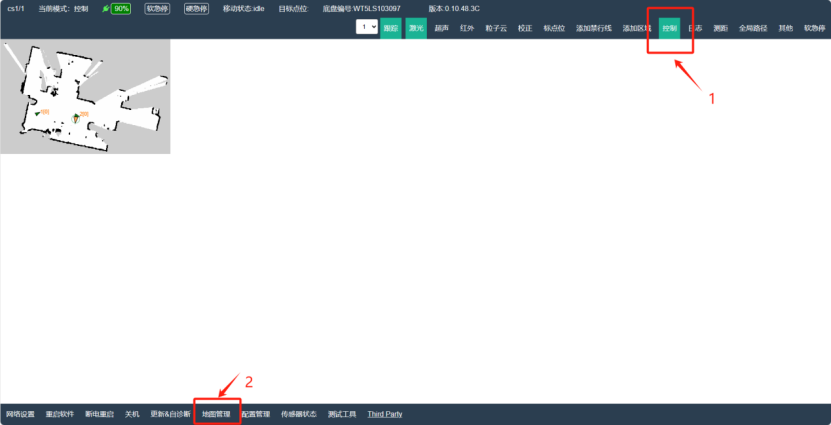
图 10 进入地图管理页面
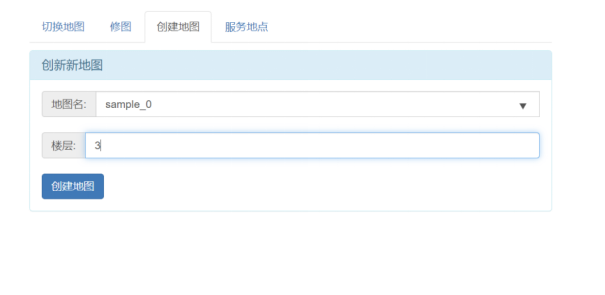
图 11-1 创建地图
创建新地图或重新扫图时,需要根据现场环境⼤⼩选择:⼤、中、⼩三种分辨率,分别对应⾯积:3600㎡以内、3600㎡~10000㎡、10000㎡以上。
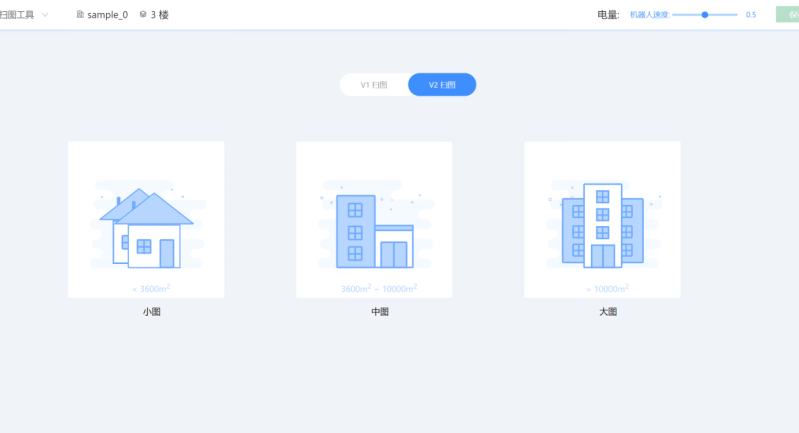
图 12选择扫图范围
3.3.4扫图
开始扫图时,建议将机器放在环境特征明显地带,即周围墙体等平整物体与拐⻆等明显,尽量避免在环境杂乱或相似度与其他位置极度吻合及半径5m内空旷地带。
可以在页面中看到跳动的箭头,代表底盘,箭头的朝向是底盘的前方。通过键盘(ijkl键)控制底盘进行运动,注意扫图过程中要适当调低底盘速度。
开始扫图后, 先控制机器在原地旋转⼀圈 ,收集完当前位置特征后继续向其他位置移动, 当遇到拐⻆时进⾏原地旋转 ,之后继续向前⾛,若现场为环形,最后⾛到起始点进⾏旋转,等待地图进⾏闭合,若⽆法闭合,可尝试多旋转⼏圈。
当所有后期机器需要到达的位置全部在地图中创建后,点击右上⻆“保存’结束建图即可。
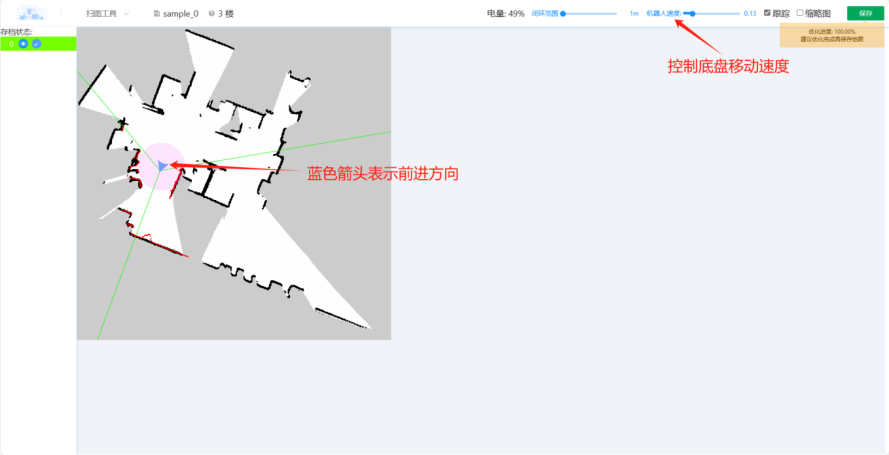
图 13 开始扫图
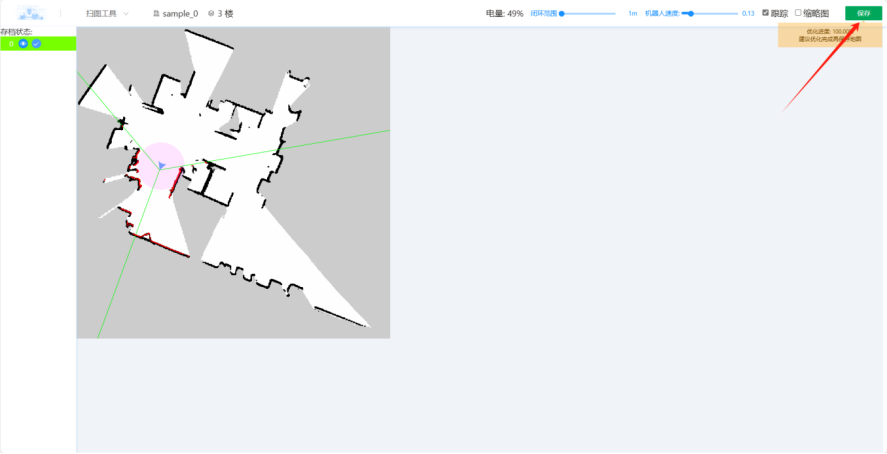
图 14 扫图完成后点击保存
当已有地图的环境存在些许改变,或增加移动房间,需要进⾏地图续扫时,输⼊需要续扫的地图名及楼层,点击“开始创建”按钮即可,当提示地图已存在时点击确定。
若当前地图⽀持续扫,右上⻆会出现续扫按钮,若只有重新扫图按钮,说明当前地图并⾮本机创建,⽆法进⾏续扫,需要找到创建地图的机器才可以进⾏续扫。

图 15 “续扫”“重新扫图”按键
扫图开始时,需要先进⾏矫正,此时需要保证机器处于之前已创建地图内,将当前机器位置在地图中矫正即可。之后操作与扫图⼀致,创建完成点击右上⻆结束建图按钮即可。
续扫步骤:
(1)为底盘选择一个初始位置:
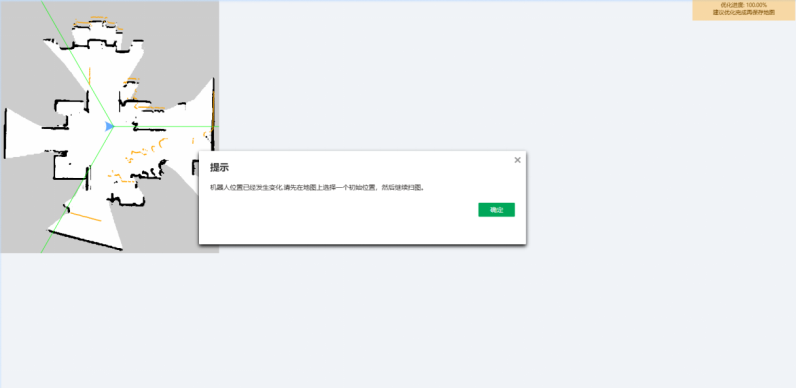
图 16 为底盘选择一个初始位置
(2)校正底盘位置:

图 17校正底盘位置
3.3.5切换地图
切换地图内为已创建地图,地图创建后需要通过切换地图功能让机器将当前使⽤地图切换到新地图内。选择要切换的地图名称,及当前机器所在楼层后点击“设置地图”按钮,即可进⾏切换。切换地图时会进⾏软件重启操作,需要等待30~50秒时间等待重启完成。

图 18 切换地图
3.3.6 返回监控界面
扫图完成后,软件会重新启动,返回到监控页面,点击“激光”可看到当前底盘激光扫描的实时数据,在页面上表现为红色边界线,点击菜单栏“控制”键使底盘在一定范围内运动,扫描到尽可能多的边界线,可发现与实际地图的黑色边界线不同,需要进行手动校正。
3.3.7 校正底盘当前位置
参考第四章节:校正底盘当前位置。
3.3.8 标注点位
可对当前位置和指定位置的点位进行标注。
底盘在进⾏移动时,需要通过当前使⽤地图所⽣成的坐标系,明确表示当前机器位置及要去的⽬标位置坐标。点位的作⽤就是记录下某些特殊位置在地图上⾯的坐标点,并提供映射后的名称,供后期发送任务时使⽤。
标定点位⽅法:
(1)⿏标放置⻚⾯标点位上,选择当前位置标定或指定位置标定。
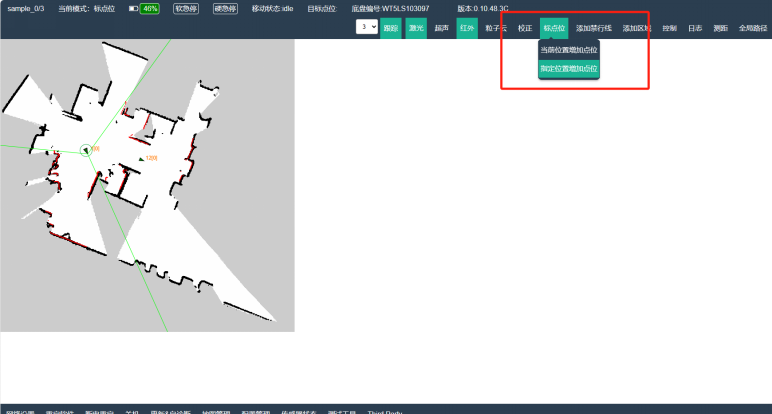
图 19 标注点位类别
(2)通过接⼝在在地图指定位置或机器当前位置进⾏标定点位,具体操作请参考接⼝⽂档:在底盘当前位置标定marker
删除/编辑点位⽅法:
(1)⿏标双击地图上代表点位的绿⾊三⻆,会弹出编辑框,点击删除即可将点位移除,或者填写需要修改的信息,并点击确定按钮即可。

图 20 删除点位
(2)通过接⼝在在地图指定位置或底盘当前位置进⾏删除点位,具体操作请参考接⼝⽂档:删除marker点位。
点位标定⽅法与矫正操作⼤同⼩异,在⻚⾯内点击为选择位置,点击后继续移动⿏标进⾏朝向选择,松开后会弹出点位属性编辑框。
名称:当前标定点位所使⽤的名称,后续此名称可以通过任务让底盘直接到达对应坐标。
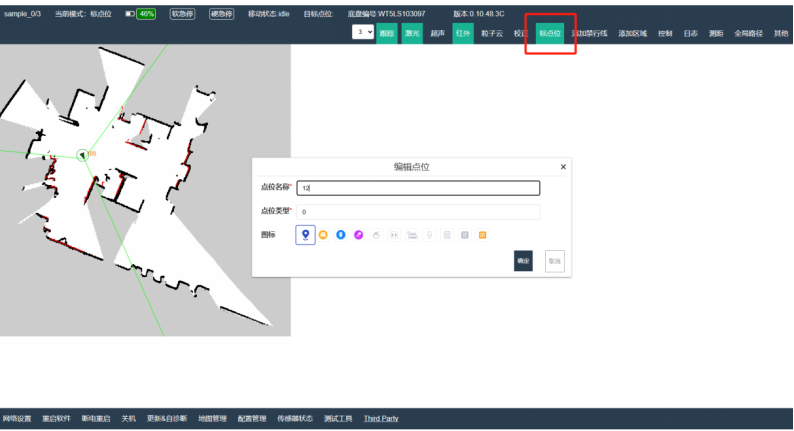
图 21 编辑点位
设置特殊点位,以充电桩位置为例:

图 22 充电桩位置设置
3.3.9添加禁行线
点击“添加禁行线”,可人为对底盘的运动空间进行控制。选中禁⾏线功能后,使⽤⿏标在界⾯内点击选择起点,继续在其他地⽅点击,两点之间会连成⼀条线,可以进⾏多次连续点击,形成连续线条。点错位置或者拉取完毕后点击⿏标右键可以调出操作菜单。
删除⽅法:
⿏标放置在禁⾏线上时,禁⾏线会变为蓝⾊,同时显示禁⾏线名称,此时双击⿏标会弹出禁⾏线编辑框,点击删除按钮即可删除

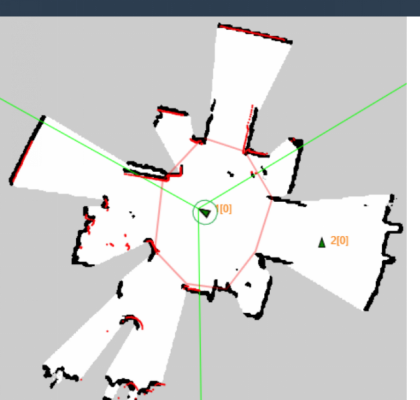
图 23 禁行线设置
3.3.10 添加路径
菜单栏上选择“添加路径”,鼠标左键点击路径起始点,到终点再次点击,右键选择结束,则此条路径规划结束。
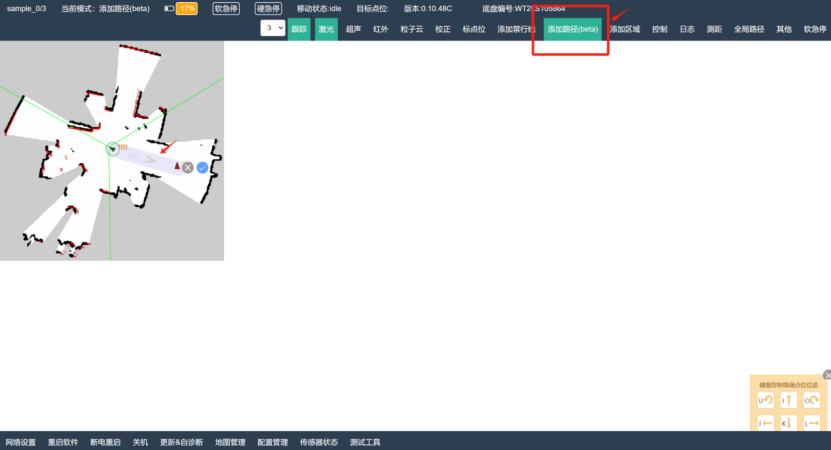
图 24 添加路径
3.3.11 测距功能
鼠标左键由起始点拖动到终点,软件页面即会显示两点之间的距离。

图 25测距功能
3.3.12 测试工具
用于进行辅助测试,测试点位之间的移动是否可以顺利执行,发送移动任务时请注意不要跟'上位机'任务冲突。在退出页面时请确保移动测试已经结束,也可以点击“取消移动”结束所有移动任务。

图 26 测试工具
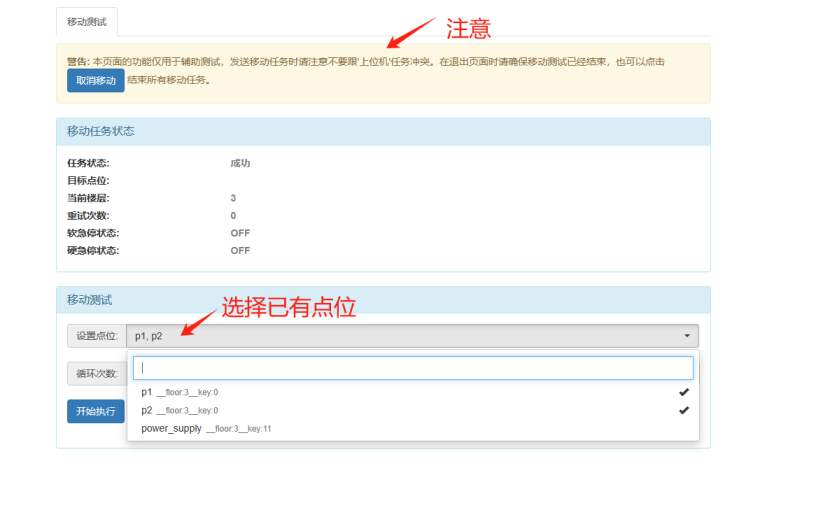
图 27 测试点位与循环执行次数选择
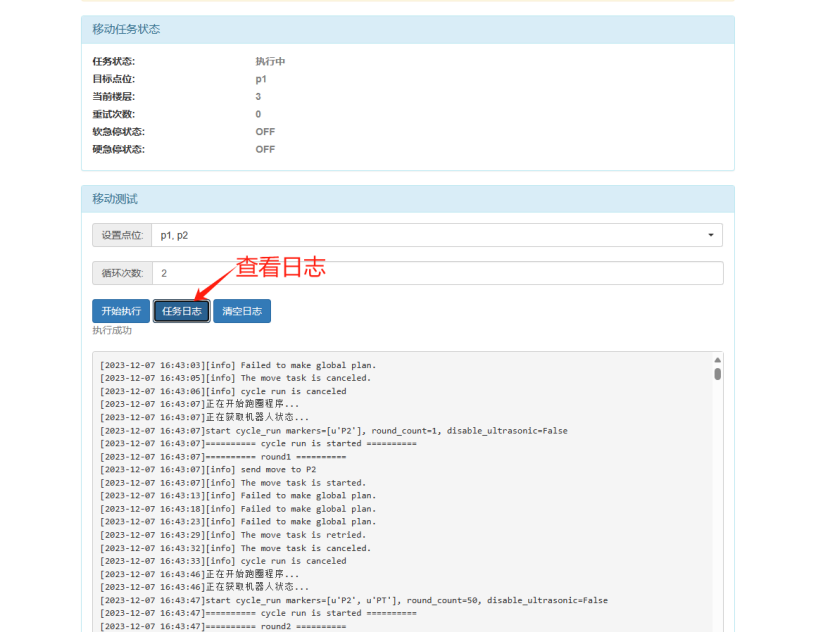
图 28 查看测试日志
3.3.13 关机
长按电源,底盘发出七声短鸣,一声长鸣后即可松开开关。
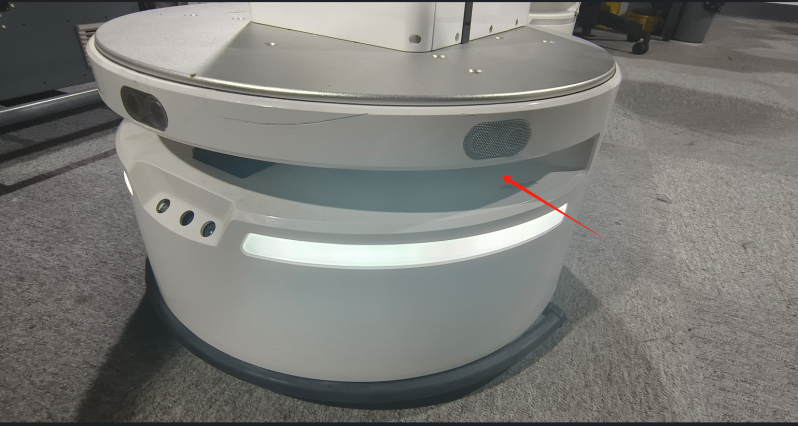
图 29 开关机键
四、校正底盘当前位置
通过鼠标点击校正按键将紫色边界线与黑色边界线尽可能重合,重合度越高,地图效果越精准。
矫正位置三种⽅法:
(1)当底盘在充电桩上进⾏充电时,且当前地图上拥有充电桩对应ID点位时,底盘会将自身位置矫正到充电桩点位上。
(2)若出现切换地图、关机后推动底盘、⾮充电中开机等情况时,底盘在地图上的位置可能会出现偏差,此时需要通过矫正功能将底盘位置矫正到地图中底盘相对于实际场景的位置。
(3)提供矫正地图接⼝,可以通过坐标点或点位进⾏矫正,具体操作请参考API接口:校正底盘当前位置。
监控⻚⾯矫正步骤:
(1) 矫正时,先在地图中找到当前底盘所在实际位置对应到地图上的位置;
(2)选中操作栏矫正按钮;
(3) ⿏标放置在地图中底盘真实所在位置,保持按下⿏标或触摸板,不要松开;
(4) 此时⻚⾯上会显示当前底盘激光数据副本,呈现出深紫⾊,滑动⿏标或触摸板,可以进⾏⻆度调整;
(5)当位置与朝向⼤致⼀致后松开⿏标,此时⻚⾯会弹出微调窗⼝,通过按键 uiojkl 或⻚⾯上显示的按钮图标可以控制激光副本进⾏前后左右,左转右转操作;
(6) 通过微调按键将当前激光副本与地图上⿊线进⾏重叠后,点击确定按钮即可完成矫正;
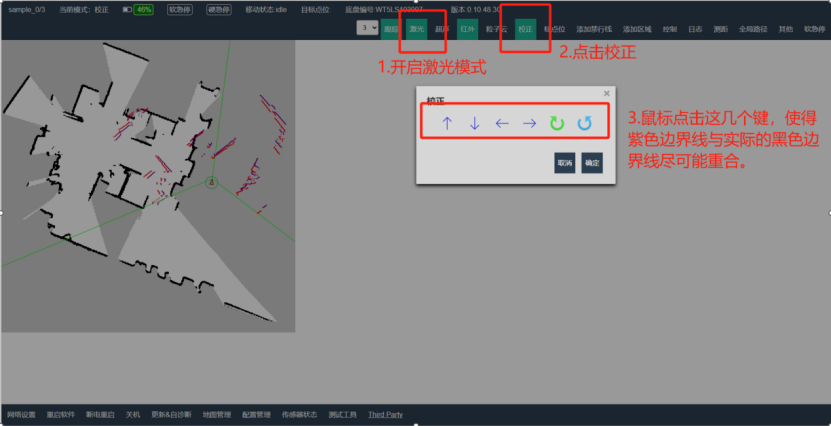
图 30 校正步骤
(7)若第五步操作偏差过⼤,可以先点确定将底盘实际位置矫正后再进⾏进⼀步矫正;
注:若底盘在充电,且地图中存在充电桩点位,则底盘会被直接矫正到充电桩点位位置,此时再进⾏矫正操作会出现底盘在矫正位置闪烁⼀下就返回原来位置。此时需要通过矫正充电桩点位,将充电桩点位标定在正确位置。
矫正功能允许存在⼀定误差,只需保证底盘当前激光与环境地形基本⼀致即可,即使存在个别地⽅不匹配或⻆度偏差,底盘在移动时都会通过软件⾃动进⾏微调矫正。但需要保证偏差位置在20cm内,⻆度在5度以内。
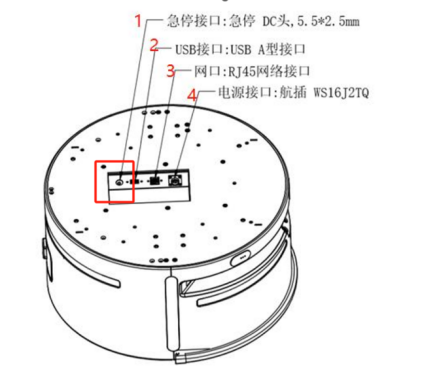
五、电气接口说明
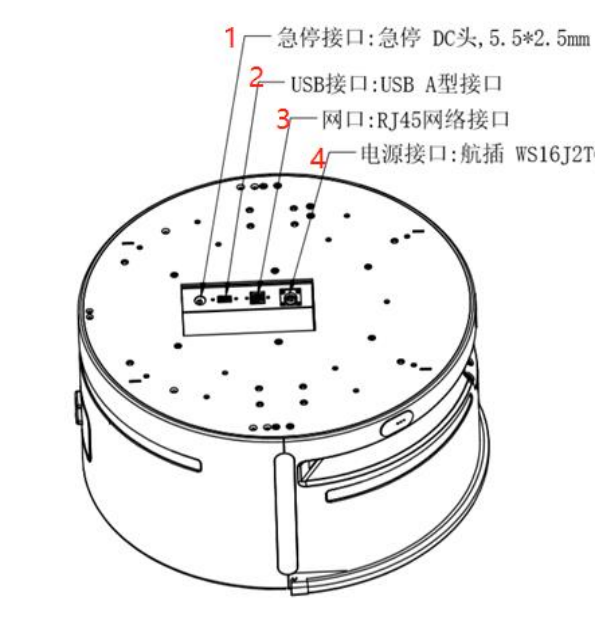
图 31 电气接口示意图

六、常用API汇总
适用环境: 基于TCP socket的网络通信。
协议形式和连接方式:
协议形式:接口内容采用类url的字符串格式,接口反馈数据统一采用json格式,同级字段间没有前后 关系,解析时请使用json的标准解析方式。
连接方式:TCP连接 网络设置:TCP客户端 服务器IP地址:
a) 192.168.10.10(这个是底盘主机的静态IP地址,TCP客户端主机需要通过路由 器等设备与底盘主机建立局域网连接,有相同网段192.168.10.*)
b) 底盘通过API连接上局域网WiFi, 然后通过API获取的局域网IP。 服务器端口:31001
建议使用socket连接方式,因为串口通信有一定概率使数据传输错误。
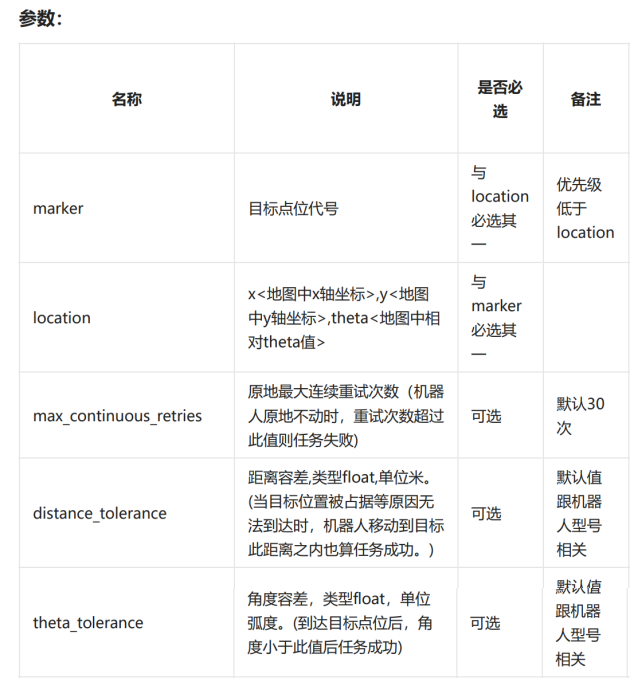
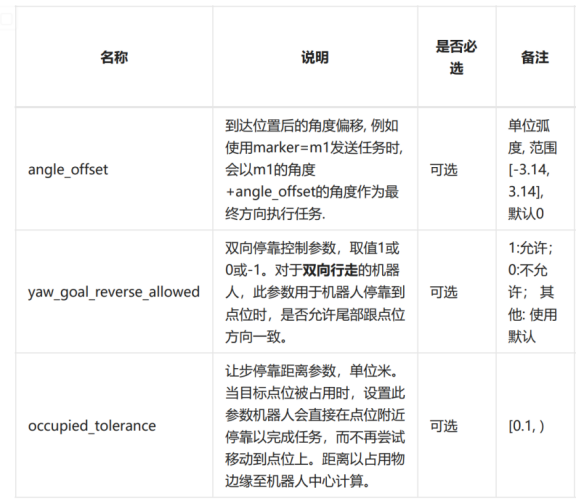
6.1 单目标点移动
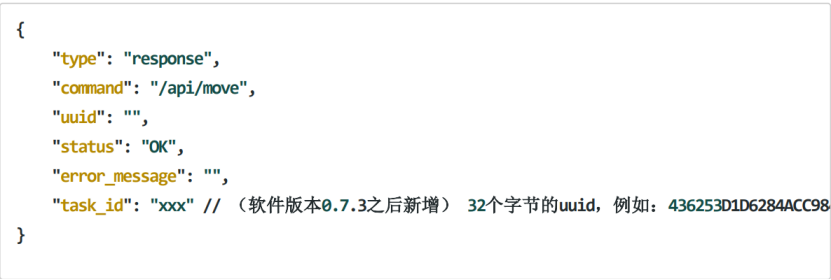
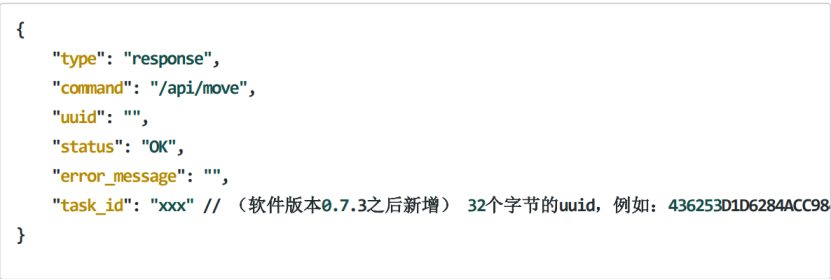
指令: /api/move

示例:
发送:

返回:
6.2 移动取消功能
指令: /api/move/cancel

6.3 点位(marker)功能接口
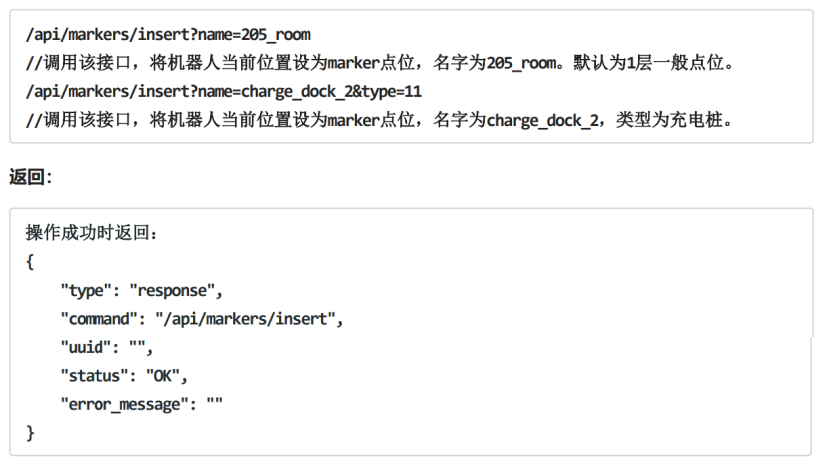
6.3.1在底盘当前位置标记marker

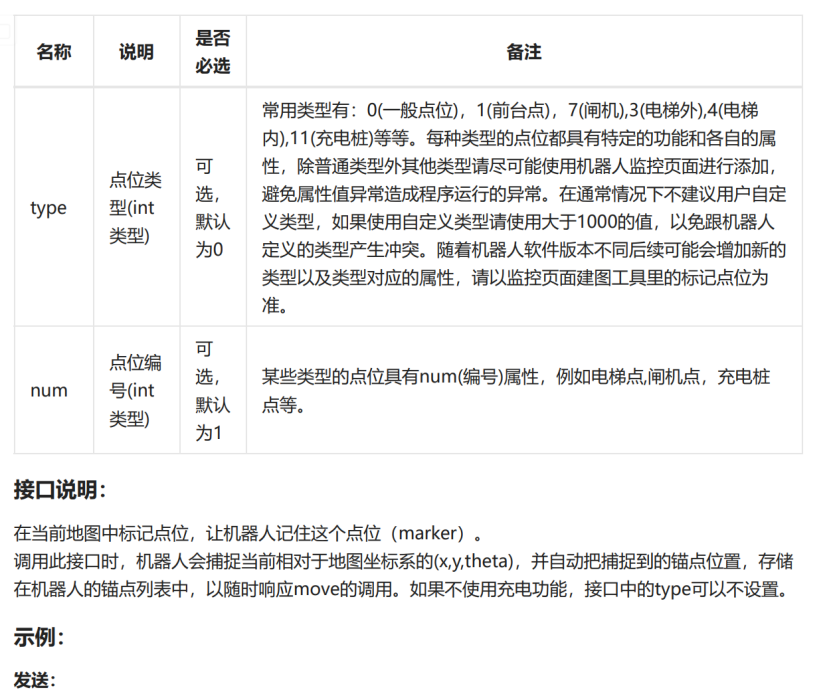
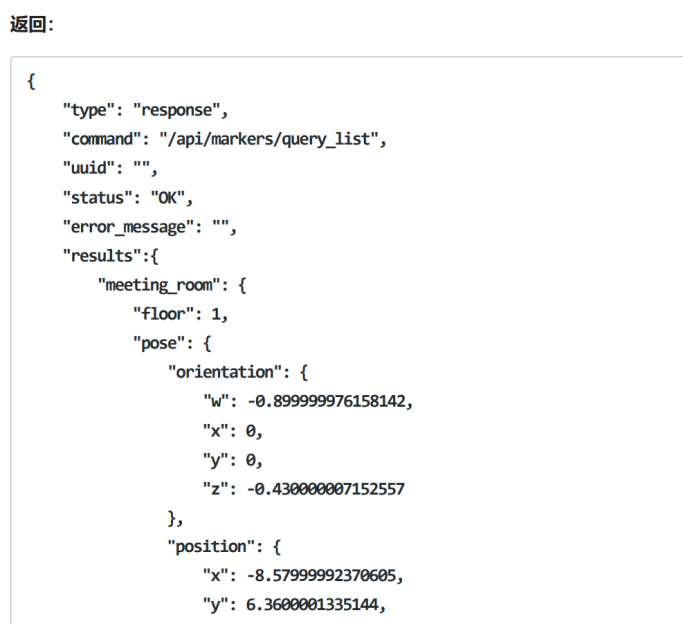
6.3.2 获取marker点位列表


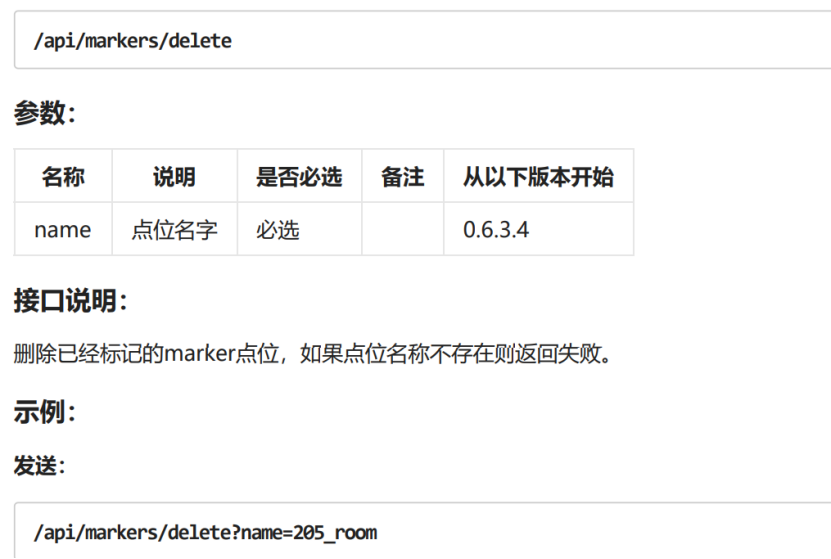
6.3.3删除marker点位
指令:

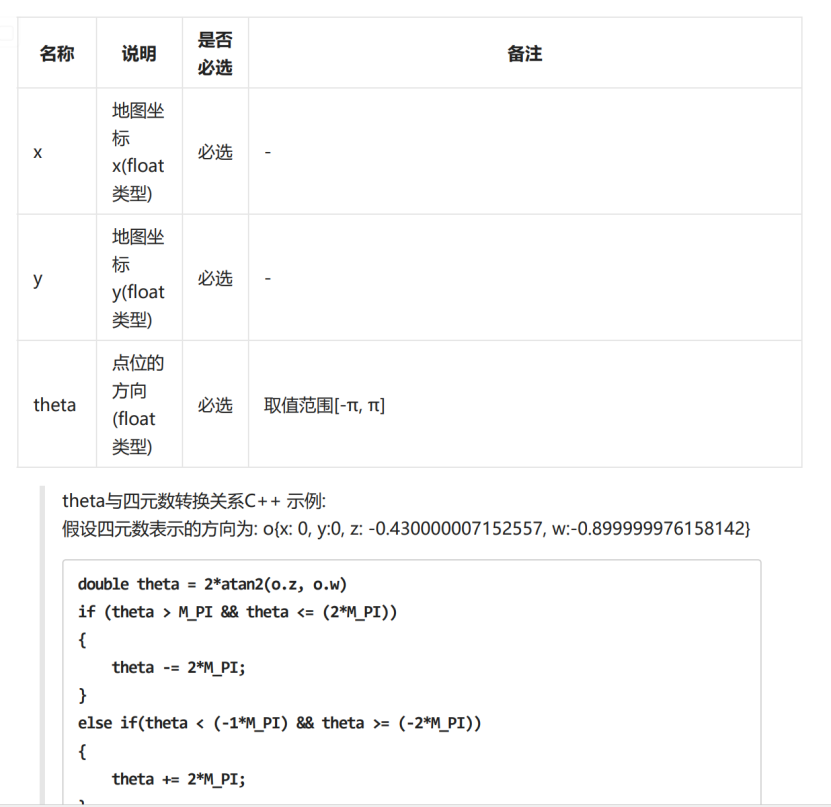
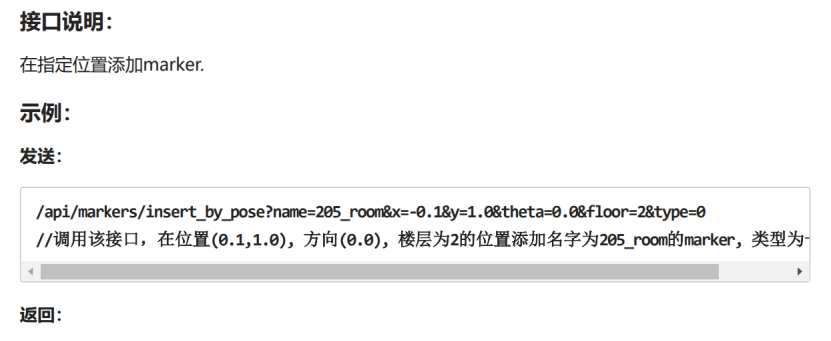
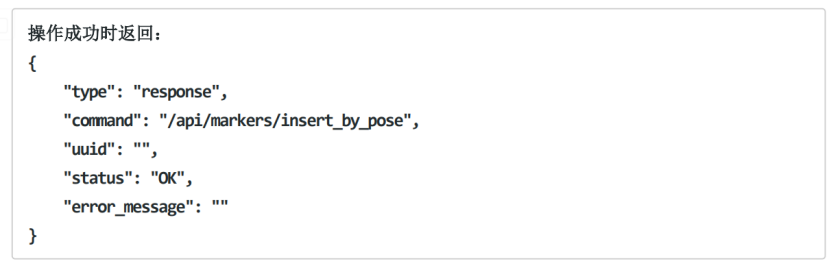
6.3.4指定坐标标记marker

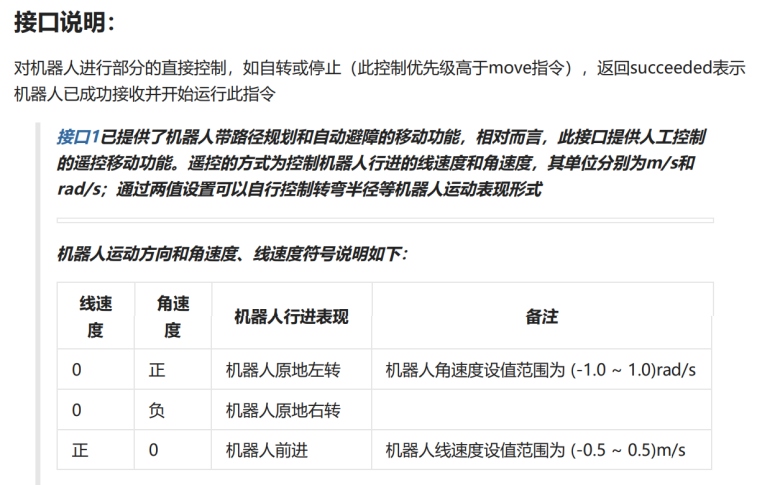
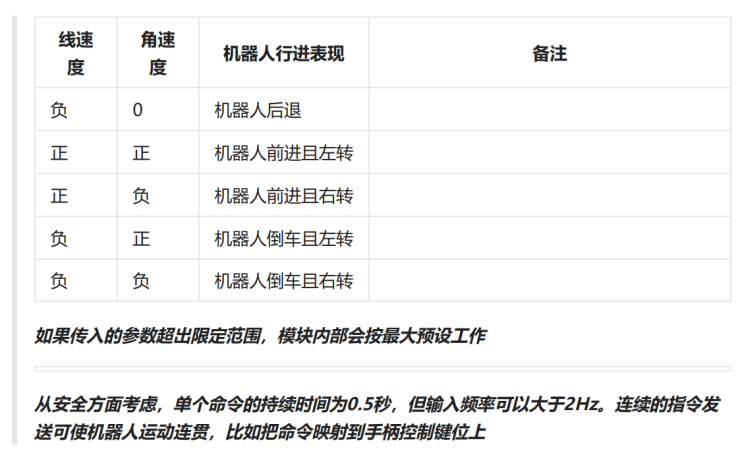
6.4 底盘直接控制指令
指令:


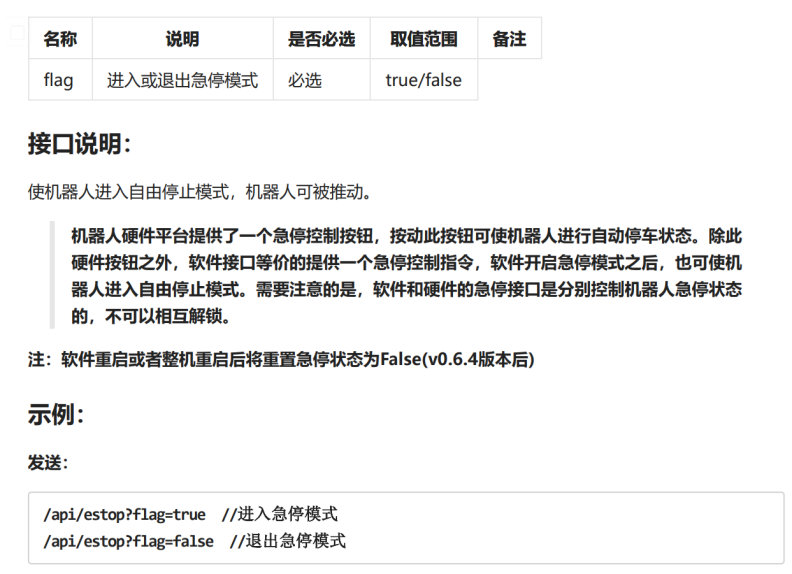
6.5 底盘急停控制指令
指令: /api/estop
参数:
6.6 校正底盘当前位置
当底盘位置在地图中已经偏移时,为了保证底盘运行稳定, 需要帮助底盘校正位置。
注:此类接口在开发过程中一般用不到,特别是在移动任务过程中无需调用此接口校正位置。普通情况下使用前端提供的校正功能即可。
6.6.1指定marker校正底盘位置
指令:
/api/position_adjust

6.6.2指定坐标校正底盘位置


七、常见问题解答
7.1 软硬急停有什么区别?
答:软急停是在示教器中,点击软件按键使底盘急停;硬急停是按下底盘的物理急停按钮。急停状态下,电机失去动⼒,可以任意推动。软急停与硬急停分别控制,相互之间不可抵消。
软急停按键:

硬急停接口:
7.2 灯闪烁不同颜色分别代表什么含义?
答:底盘灯带在不同阶段会有不同状态提示
绿⾊闪烁: 电源开启,⼯控机启动中;
⽩⾊常亮: 开机完成及正常⼯作;
⽩⾊呼吸: 充电中;
⽩⾊闪烁: 急停按下。
7.3 底盘开机后位置不准应该怎么办?
答: 手动校正位置(参考第四章节)或让底盘回到充电桩位置,自动校正所在位置。
7.4 底盘在导航时出现乱走或四处打转的情况怎么办?
检查激光雷达外壳是否有脏污,红外线传感器是否有污渍,需擦拭。
7.5底盘在导航时给下发了一个底盘前方的点位,底盘却一直向后运动怎么办?
检查底盘底部的黑色碰撞条是否掉落,内置的线缆是否断开,如若断开则碰撞信号将一直被触发,导致底盘无法正常导航。
八、应用程序示例
示例:底盘在两点之间的运动
指令: /api/move
前期操作:需在示教器上创建地图,并标注好两个点位“Test_1”,“Test_2”
在程序当中进行调用:
import socket
import json
import time
def send_receive(sock, message):
sock.send(message.encode('utf-8'))
receive_data = sock.recv(1024)
return sock.recv(1024).decode()
def move_chassis(client,marker):
move_command = f'/api/move?marker={marker}'
client.send(move_command.encode('utf-8'))
chassis_receive_data = client.recv(1024)
while True:
response = client.recv(1024).decode()
print("Response:", response)
data = json.loads(response)
move_code = data.get("code")
if move_code == "01002":
print("Move completed successfully.")
break
def main():
chassis_client = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
chassis_host = '192.168.10.10'
chassis_port = 31001
chassis_client.connect((chassis_host, chassis_port))
#Move chassis
time.sleep(3)
target_marker = 'Test_1'
move_chassis(chassis_client,target_marker)
print("chassis ok")
time.sleep(10)
target_marker = 'Test_2'
move_chassis(chassis_client,target_marker)
print("chassis ok")
time.sleep(10)
chassis_client.close()
if __name__ == "__main__":
main()
附件下载
0 条评论




撰写评论