

【睿尔曼-RealMan】睿尔曼超轻量仿人机械臂—通过虚拟机控制机械臂使用说明
l 2024-04-25
一、介绍
由于很多开发人员是在Linux下进行开发,但文件资料大多是保存在Windows下,使用双系统就需要来回切换系统 ,此时使用虚拟机就是个很好的选择。
二、要求
环境要求:虚拟机、Ubuntu18.04或Ubuntu20.04、ROS
硬件要求:网线、RM机械臂、电脑
进行控制机械臂之前需要先在Windows下安装虚拟机,然后在虚拟机中安装Ubuntu系统。这里使用的是Ubuntu18.04,故安装的ros版本为melodic。这里就不过多介绍ros的安装,可根据ros官网教程进行安装。
三、通信设置
将RM机械臂ip、电脑、以及ubuntu下的ip设置在同一网段下,需要注意避免ip冲突。
这里用到的ip如下:
 用户也可自行设置其他网段的ip。
用户也可自行设置其他网段的ip。
四、操作步骤
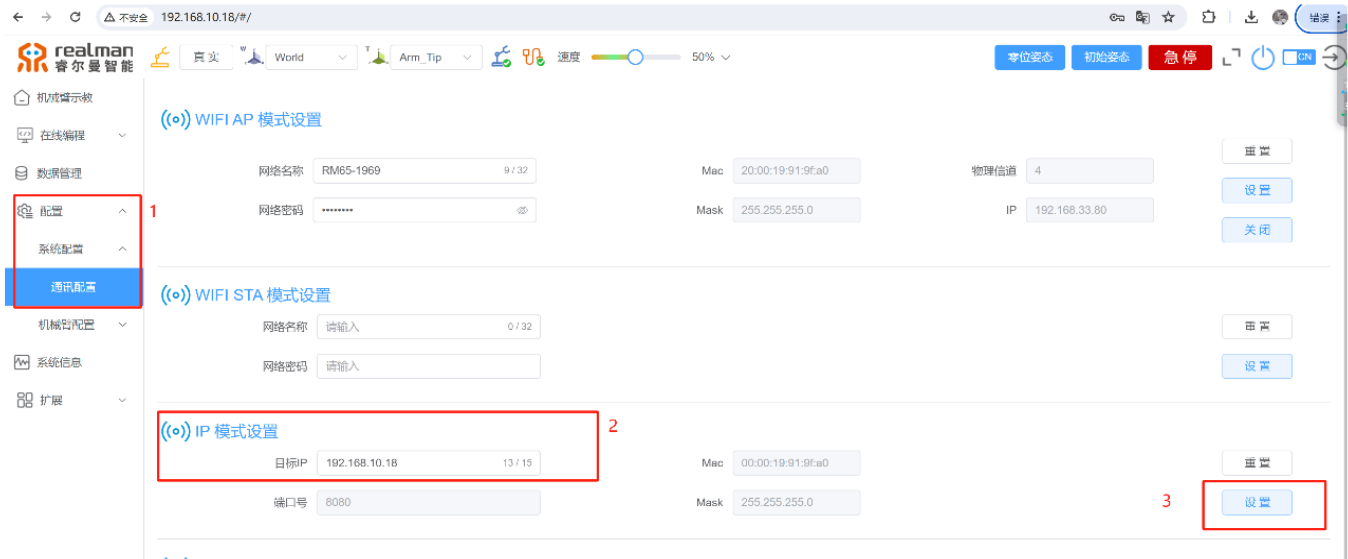
1、机械臂ip设置
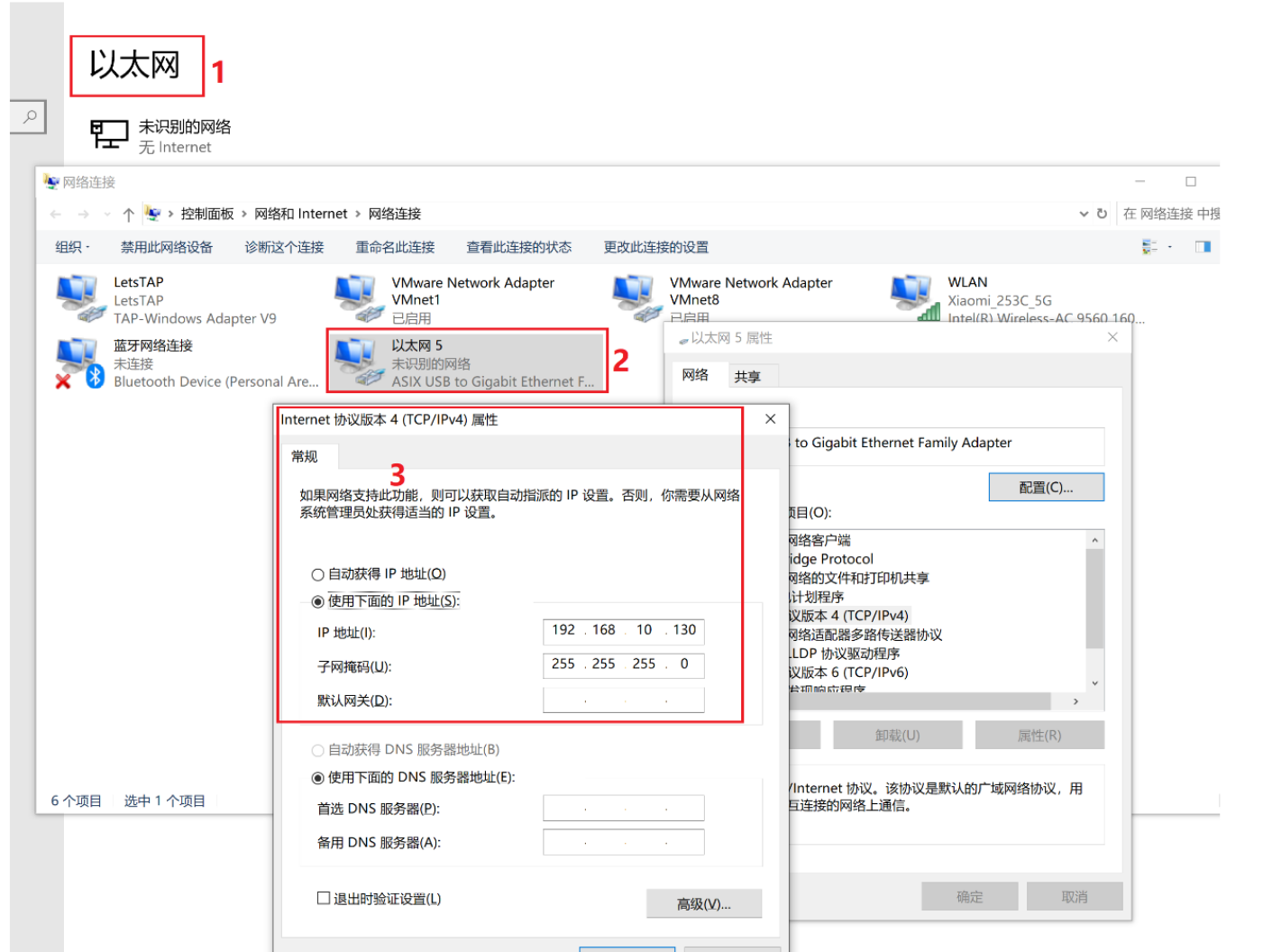
2、电脑ip设置
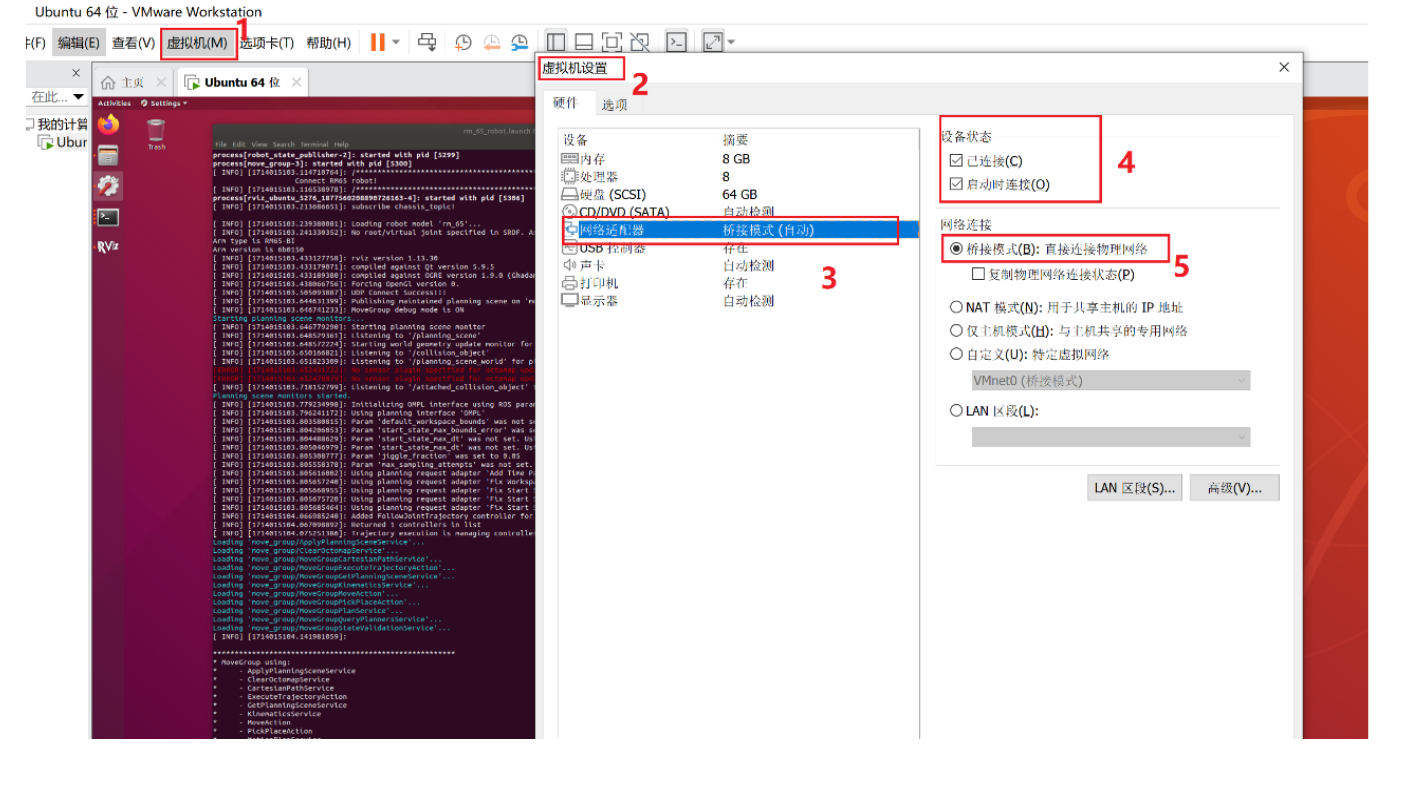
3、虚拟机网络设置
4、Ubuntu ip设置
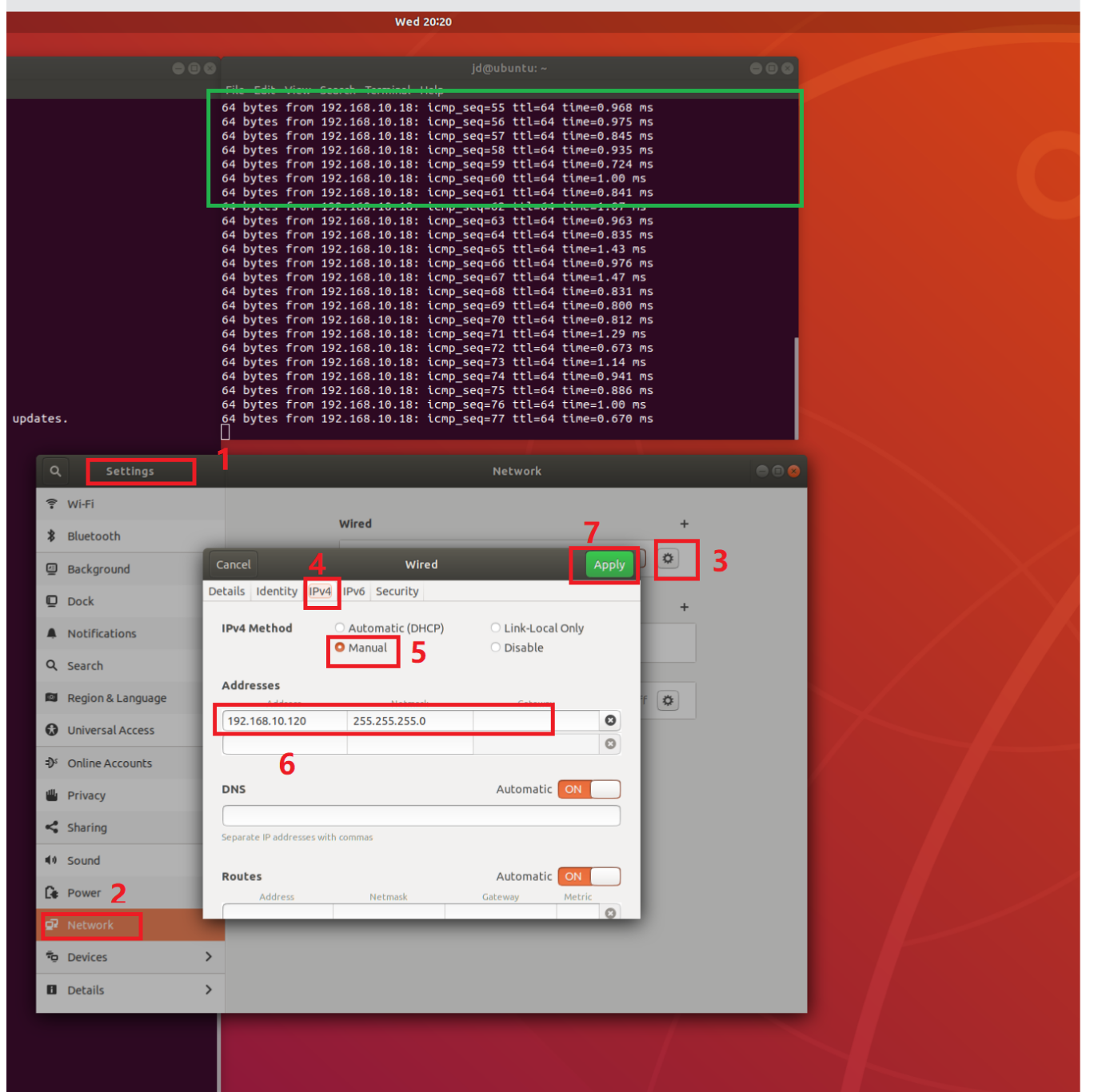
设置完有线连接的ip后,需重新开启下有线连接,否则会出现修改后的ip没有生效。
5、启动RM机械臂ros节点。
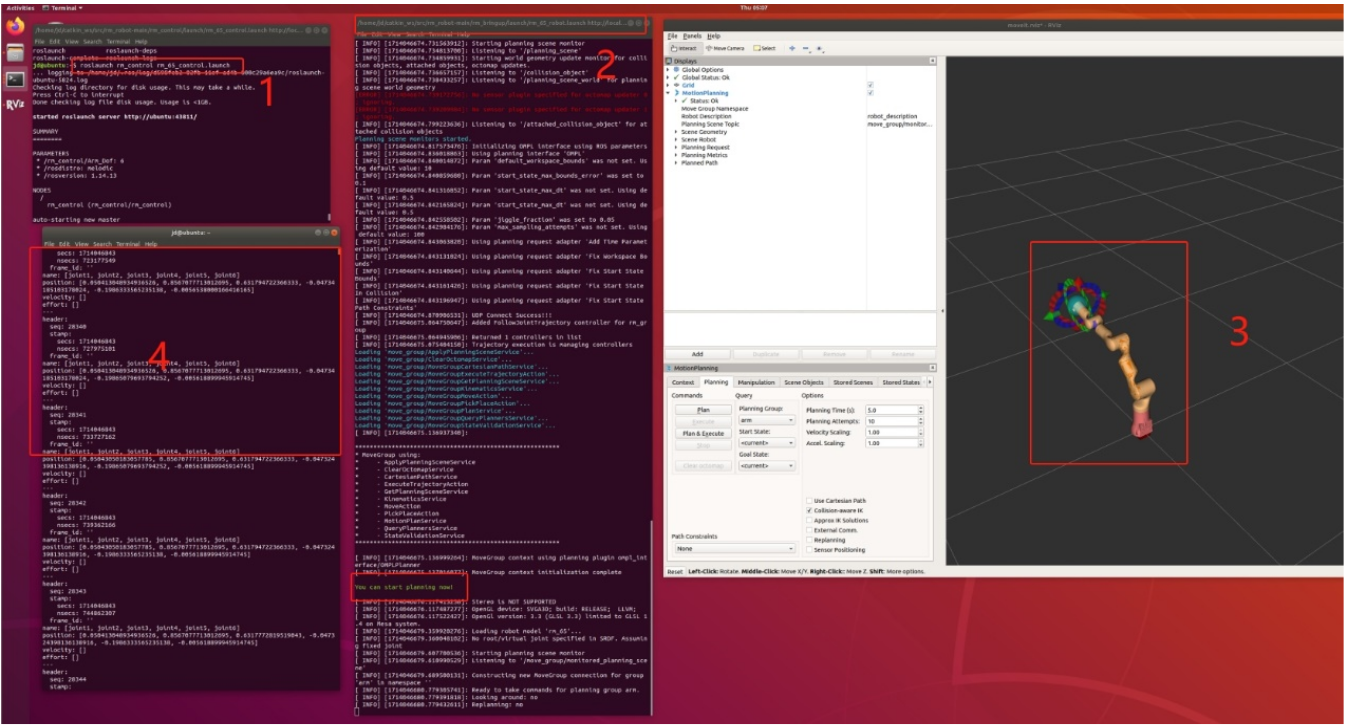
如若前面步骤无误,则可以看到上述图片1、2和3的内容。
此时可实时打印出机械臂的关节信息/joint_states进行验证。
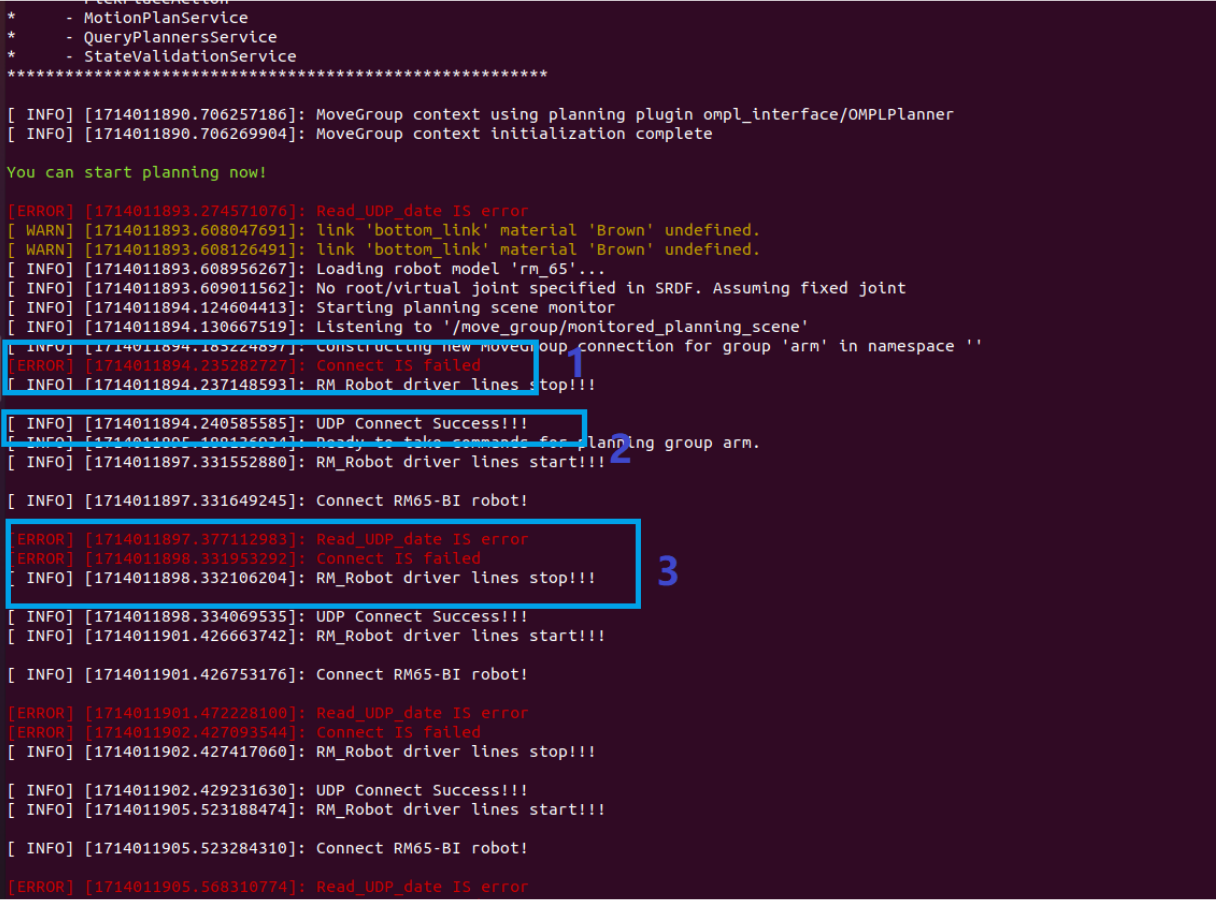
五、问题处理
在运行rm_bringup中的launch文件时,经常会出现:
“Read_UDP_date IS error”和“connect IS failed”。
出现udp数据读取错误是因为没有虚拟机的网络设置出现了问题,此时是无法通过ros控制机械臂运动,需检查第四节关于虚拟机网络设置是否正确。




撰写评论