

【睿尔曼-RealMan】睿尔曼超轻量仿人机械臂--医疗工作站运行Demo(Python)
Brion 2024-04-24
一、Python语言开发环境
1.Win10系统下使用
开发环境
系统:win10
IDE:PyCharm
Python版本:python 3.11.2
由于机械臂相关软件版本不定期更新,如果你使用的软件接口或协议与本文有出入,请联系官方技术人员及时更新。
2.项目创建
创建python文件,可以通过多种方式,本文中以Pycharm为示例。详述从项目创建到实际运行控制机械臂。
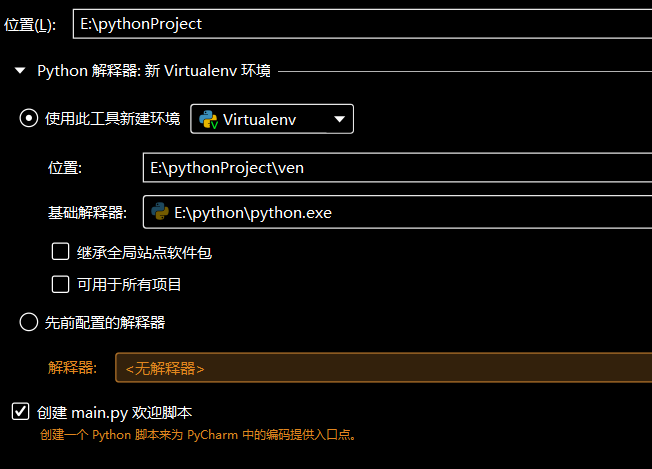
创建Python项目。打开Pycharm软件,在右上角’File-->New Project’。打开新建项目界面,在界面中可选择项目路径及项目名称、Python版本等信息。最后点击界面右下角‘Create’按钮。
3.写入Python程序
本文基于医疗工作站运行过程开发demo。将以下程序写入Python程序中即可。代码如下:
| import socket import time import json client1 = socket.socket(socket.AF_INET, socket.SOCK_STREAM) # 左臂 Lift = '192.168.1.18' # 右臂 Right = '192.168.1.19' # 打开控制器RS485 controller_modbus1 = '{"command":"set_modbus_mode","port":0,"baudrate":115200,"timeout":2}\r\n' # 夹爪2初始化 gripper2_init = '{"command":"write_registers","port":0,"address":1000,"num":1,"data":[0,0],"device":9}\r\n' # 夹爪2上使能 gripper2_activate = '{"command":"write_registers","port":0,"address":1000,"num":1,"data":[0,1],"device":9}\r\n' # 夹爪2全速张开 gripper2_open = '{"command":"write_registers","port":0,"address":1000,"num":3,"data":[0, 9, 0, 0,255, 255],"device":9}\r\n' # 夹爪2全速闭合 gripper2_close = '{"command":"write_registers","port":0,"address":1000,"num":1,"data":[4,11],"device":9}\r\n' # 打开末端RS485 controller_modbus3 = '{"command":"set_modbus_mode","port":1,"baudrate":115200,"timeout ":2}\r\n' # 夹爪1初始化 gripper1_init = '{"command":"write_registers","port":1,"address":1000,"num":2,"data":[0, 0, 0 ,0],"device":9}\r\n' # 夹爪1上使能 gripper1_activate = '{"command":"write_registers","port":1,"address":1000,"num":2,"data":[0,1,0,1],"device":9}\r\n' # 夹爪1旋转使能 gripper1_activate1 = '{"command":"write_registers","port":1,"address":1004,"num":4,"data":[1,104,1,128,1,104,2,2],"device":9} \r\n' # 夹爪1正转2圈 gripper1_turn1 = '{"command":"write_registers","port":1,"address":1004,"num":4,"data":[1,104,32,32,2,104,0,2],"device":9}\r\n' # 夹爪1反转3圈 gripper1_turn2 = '{"command":"write_registers","port":1,"address":1004,"num":4,"data":[1,104,32,32,-3,104,0,2],"device":9}\r\n' # 夹爪1全速张开 gripper1_open = '{"command":"write_registers","port":1,"address":1000,"num":1,"data":[1,11],"device":9} \r\n' # 夹爪1半速闭合 gripper1_close = '{"command":"write_registers","port":1,"address":1000,"num":1,"data":[2,11],"device":9}\r\n' # 灵巧手拇指抬起 dexterous_hands_up = '{"command":"set_hand_seq","seq_num":1}\r\n' # 灵巧手拇指按下 dexterous_hands_down = '{"command":"set_hand_seq","seq_num":2}\r\n' # 右臂初始点位(低速) right_robot_first = '{"command":"movej","joint":[90000,-90000,90000,-90000,90000,-30000],"v":5,"r":0,"trajectory_connect":0}\r\n' # 右臂初始点位(高速) right_robot_first_50 = '{"command":"movej","joint":[90000,-90000,90000,-90000,90000,-30000],"v":50,"r":0,"trajectory_connect":0}\r\n' # 左臂初始点位(低速) lift_robot_first = '{"command":"movej","joint":[0,30000,-120000,0,90000,0],"v":5,"r":0,"trajectory_connect":0}\r\n' # 左臂初始点位(高速) lift_robot_first_50 = '{"command":"movej","joint":[0,30000,-120000,0,90000,0],"v":50,"r":0,"trajectory_connect":0}\r\n' # 左臂夹取预备点 lift_robot_clamping_up = '{"command":"movej","joint":[689,23747,-137732,24724,86936,-67],"v":50,"r":0,"trajectory_connect":0}\r\n' # 左臂夹取点 lift_robot_clamping_down = '{"command":"movej","joint":[671,20176,-140953,31515,86934,-87],"v":5,"r":0,"trajectory_connect":0}\r\n' # 左臂夹取抬起点2 lift_robot_clamping_down2 = '{"command":"movej","joint":[692,24377,-135531,21888,86933,-68],"v":5,"r":0,"trajectory_connect":0}\r\n' # 左臂夹取抬起点3 lift_robot_clamping_down3 = '{"command":"movej","joint":[685,27501,-127202,10439,86932,-70],"v":5,"r":0,"trajectory_connect":0}\r\n' # 左臂放回抬起点3 lift_robot_clamping_down3_1 = '{"command":"movej","joint":[692,24794,-136119,22056,86934,-63],"v":1,"r":0,"trajectory_connect":0}\r\n' # 左臂夹取抬起点4 lift_robot_clamping_down4 = '{"command":"movej","joint":[690,27714,-128872,11896,86940,-96],"v":5,"r":0,"trajectory_connect":0}\r\n' # 左臂扫码点 lift_Scan_the_code = '{"command":"movej","joint":[-46458,38633,-129434,855,87540,-63],"v":50,"r":0,"trajectory_connect":0}\r\n' # 左臂开盖预备点1 lift_Open_the_lid_up_1 = '{"command":"movej","joint":[-29259,86,-98931,8309,87449,-498],"v":50,"r":0,"trajectory_connect":0}\r\n' # 左臂开盖预备点2 lift_Open_the_lid_up_2 = '{"command":"movej","joint":[-29264,-3738,-109940,23142,87449,-504],"v":5,"r":0,"trajectory_connect":0}\r\n' # 左臂开盖抬起点 lift_Open_the_lid_raise = '{"command":"movej","joint":[-29264,-3738,-109940,23142,87449,-504],"v":1,"r":0,"trajectory_connect":0}\r\n' # 左臂关盖抬起点 lift_Open_the_lid_raise_50 = '{"command":"movej","joint":[-29264,-3738,-109940,23142,87449,-504],"v":50,"r":0,"trajectory_connect":0}\r\n' # 左臂开盖点 lift_Open_the_lid = '{"command":"movej","joint":[-29267,-7683,-115002,32150,87448,-506],"v":5,"r":0,"trajectory_connect":0}\r\n' # 左臂关盖点 lift_Open_the_lid_2 = '{"command":"movej","joint":[-29267,-7683,-115002,32150,87448,-506],"v":4,"r":0,"trajectory_connect":0}\r\n' # 右臂吸取预备点 right_learn_up = '{"command":"movej","joint":[96317,-90006,88564,-117973,89829,-30086],"v":50,"r":0,"trajectory_connect":0}\r\n' # 右臂吸取点 right_learn_down = '{"command":"movej","joint":[96304,-117306,108029,-117726,86164,-37017],"v":50,"r":0,"trajectory_connect":0}\r\n' # 右臂注入过度点 right_inject_excessive = '{"command":"movej","joint":[102384,-99187,99769,-64241,89869,-30038],"v":50,"r":0,"trajectory_connect":0}\r\n' # 右臂注入点 right_inject_target = '{"command":"movej","joint":[129148,-99191,103572,-95559,92741,-30526],"v":50,"r":0,"trajectory_connect":0}\r\n' def Robot_instruct(lr, instruct): client = socket.socket(socket.AF_INET, socket.SOCK_STREAM) host = lr port = 8080 client.connect((host, port)) print('Robot_right_connect--OK') control = instruct client.send(control.encode('utf-8')) time.sleep(0.5) result = client.recv(1024).decode() print(result) client.close() if __name__ == "__main__": while True: # 右臂外部设备测试 Robot_instruct(Right, controller_modbus1) Robot_instruct(Right, gripper2_init) Robot_instruct(Right, gripper2_activate) time.sleep(2) Robot_instruct(Right, gripper2_open) time.sleep(1) Robot_instruct(Right, dexterous_hands_down) time.sleep(1) Robot_instruct(Right, dexterous_hands_up) Robot_instruct(Right, right_robot_first) # 左臂外部设备测试 Robot_instruct(Lift, controller_modbus3) Robot_instruct(Lift, gripper1_init) Robot_instruct(Lift, gripper1_activate) Robot_instruct(Lift, gripper1_activate1) time.sleep(2) Robot_instruct(Lift, gripper1_open) Robot_instruct(Lift, lift_robot_first) # --------------------------------------------------------------------------------------------------------------------- # 左臂夹取 Robot_instruct(Lift, gripper1_open) time.sleep(1) Robot_instruct(Lift, lift_robot_clamping_up) Robot_instruct(Lift, lift_robot_clamping_down) time.sleep(0.5) Robot_instruct(Lift, gripper1_close) time.sleep(0.5) Robot_instruct(Lift, lift_robot_clamping_down2) Robot_instruct(Lift, lift_robot_clamping_down3) # Robot_instruct(Lift, lift_robot_clamping_down4) Robot_instruct(Lift, lift_robot_first) Robot_instruct(Lift, lift_Scan_the_code) Robot_instruct(Lift, gripper1_turn1) time.sleep(4) Robot_instruct(Lift, lift_Open_the_lid_up_1) Robot_instruct(Lift, lift_Open_the_lid_up_2) Robot_instruct(Lift, lift_Open_the_lid) time.sleep(0.5) Robot_instruct(Right, gripper2_close) time.sleep(0.5) Robot_instruct(Lift, gripper1_open) time.sleep(0.5) Robot_instruct(Lift, gripper1_close) time.sleep(0.5) Robot_instruct(Lift, gripper1_turn2) time.sleep(2) Robot_instruct(Lift, gripper1_turn2) time.sleep(1) Robot_instruct(Lift, gripper1_turn2) Robot_instruct(Lift, lift_Open_the_lid_raise) Robot_instruct(Lift, lift_Open_the_lid_up_1) Robot_instruct(Lift, lift_robot_first_50) time.sleep(1) # 右臂滴液 Robot_instruct(Right, right_robot_first) Robot_instruct(Right, right_learn_up) time.sleep(0.5) Robot_instruct(Right, dexterous_hands_down) time.sleep(0.5) Robot_instruct(Right, right_learn_down) time.sleep(0.5) Robot_instruct(Right, dexterous_hands_up) time.sleep(0.5) Robot_instruct(Right, right_learn_up) Robot_instruct(Right, right_robot_first_50) Robot_instruct(Right, right_inject_excessive) Robot_instruct(Right, right_inject_target) time.sleep(0.5) Robot_instruct(Right, dexterous_hands_down) time.sleep(0.5) Robot_instruct(Right, dexterous_hands_up) time.sleep(0.5) Robot_instruct(Right, right_inject_excessive) Robot_instruct(Right, right_robot_first_50) time.sleep(1) # 左臂取回 Robot_instruct(Lift, lift_Open_the_lid_up_1) Robot_instruct(Lift, lift_Open_the_lid_raise_50) time.sleep(0.5) Robot_instruct(Lift, gripper1_turn1) Robot_instruct(Lift, lift_Open_the_lid_2) Robot_instruct(Lift, gripper1_turn1) time.sleep(2.5) Robot_instruct(Lift, gripper1_close) time.sleep(1) Robot_instruct(Right, gripper2_open) Robot_instruct(Lift, lift_Open_the_lid_up_2) Robot_instruct(Lift, lift_Open_the_lid_up_1) time.sleep(0.5) Robot_instruct(Lift, lift_robot_first_50) Robot_instruct(Lift, lift_robot_clamping_down4) Robot_instruct(Lift, lift_robot_clamping_down3_1) Robot_instruct(Lift, gripper1_open) Robot_instruct(Lift, lift_robot_first_50) time.sleep(5) |
|---|
4.运行实例
运行结果展示:
详情见附件
0 条评论




撰写评论