

【睿尔曼-RealMan】ALOHA具身智能 双臂数据收集平台——技术方案
Alvin 2024-04-22
一、产品概述
1.1、产品背景
遥操作是指操作者通过手控器、手柄等人机交互装置和设备控制远地的机器人完成作业任务的行为。操作者通过主机器人向从机器人发送指令,同时感受到从机器人和外界的交互信息,从而完成遥操作任务。这种主从式系统通常被认为是一种有效的遥操作方法,它实际上是一个人、机协作系统,通过遥操作将操作者的智能映射到任务环境中,借助于人的智能和经验来完成复杂环境下的作业。人在系统中的介入,能够弥补机器人在控制、传感以及人工智能等方面的不足。
随着人类探索领域的不断扩展,人类探索活动的危险性和复杂性日益增长,如空间探测、核能利用、远程制造、深海探测等。出于对操作者的安全考虑,这些活动往往需要引入遥操作机器人系统。随着人类空间活动的不断发展,特别是近年来各国对太阳系以及深空探索计划的逐步展开,将会有大量的空间生产、空间加工、空间装配、空间维护和修理工作。然而,向空间发送宇航员需要大量的资金,而且由于空间工作需要在一个了解不多并且不可控的环境中进行,舱外活动存在一定的危险,因此必须充分利用机器人技术,减小人类从事危险工作的代价和成本。但智能机器人的研究现状表明,由于受到机构、控制、传感和人工智能等支撑技术的限制,研制出能在未知或复杂环境下全自主方式工作的智能机器人,是短期内难以达到的目标。因此,利用现有技术以及人机合作的遥操作机器人概念,机器人也可以在许多空间任务中替代人,以降低成本和危险并且增强人类的活动能力。从长期观点看,遥操作是机器人完成复杂或危险环境下远地作业任务的主要手段,有助于扩大人类的探索活动范围,提升各种类型环境作业的能力。

(空间站用操作控制)
随着人类社会的发展,人类正在极力打破空间距离的约束,消除各地资源分布不均、发展情况不一的问题。远程手术是现代科技的结晶之作,使用者通过操作主机械臂与观看实时画面,判断远程从机械臂的执行情况,帮助远距离病人及时接收治疗。类似的,遥操作系统结合机器人还可以用于远程排爆、远程灭火等危险场景,不仅能够挽救人类生命,也可以最大程度上减少人类面临的危险。
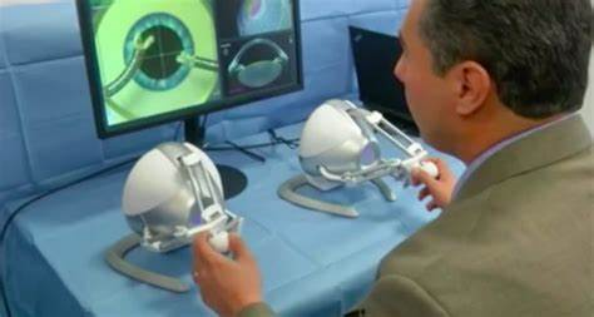
(远程手术遥操作控制)
Mobile ALOHA是斯坦福大学符博士领导的研究团队开发的一套全开源全身遥操作系统,其在自主设计的带移动底盘的双臂机器人上,通过模仿学习算法与静态ALOHA数据共同训练,仅用50个示教,双臂机器人就熟练的实现了自主完成复杂的移动操作任务。

(示教采集数据)

(机器人自主完成任务)
为提升机器人移动性和灵活性,Mobile ALOHA通过人类的遥操作示教运动,收集双手和全身控制的动态操作任务数据,最后依托Mobile ALOHA收集的丰富数据,通过端到端迁移学习来训练和纠正复合机器人的协同进化速度和精细化控制能力,使机器人具备成功克隆人类行为和任务的能力。这一成果的发布,不仅提供了一种新的数据收集方法,还展示了如何有效地利用已有的数据集进行高效迁移学习,以更方便提高机器人在复杂环境中的操作能力。特别是在需要双手和全身控制的复合移动操作任务中,这种方法具有前景广阔的应用潜力,也让人们看到了机器人真正走进千家万户的可能性。
Mobile ALOHA为机器人学习和移动操作研究提供了一个经济高效的解决方案,使得更多的研究者和开发者能够参与到这一领域中来,让真正能够完成实际场景任务的家政机器人量产成为可能。
1.2、产品功能
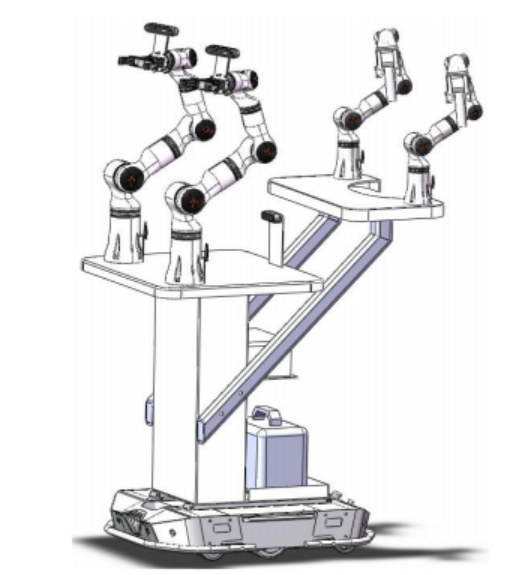
ALOHA具身智能双臂数据收集平台主要具有机械臂主从控制、平台移动操作、示教数据采集三部分功能,能够轻松灵活地跟随使用者示教运动,并同时提供稳定的系统数据,助力客户基于ALOHA具身智能双臂数据收集平台完成各场景任务。
(1)机械臂主从控制:主从机械臂都可自主操作,末端带有二指夹爪,可通过程序控制完成桌面物体拿取、放置、整理等任务。在遥操作模式下,使用者通过控制RM主机械臂,主机械臂记录关节转动数据,通过机械臂自带的透传功能,将主机械臂的数据通过5ms的高跟随透传到从机械臂,以完成机械臂的运动映射。主机械臂末端带有夹爪控制器,可以通过夹爪控制器控制从机械臂的末端夹爪张开或闭合,使系统平台能够完成日常生活中的场景任务,并采集任务数据。在普通模式下,两套机械臂都可以单独使用。
(2)平台移动操作:ALOHA具身智能双臂数据收集平台带有移动底盘,给了机器人接近人类的移动速度。平台将操作者的身体与机器人底座相连。操作者通过背带与底座相连,并通过拉动底座来控制机器人的移动。这种设计允许操作者在控制机器人的移动的同时,用双手操纵ALOHA的双臂。
(3)示教数据采集:在数据采集模式下,使用者操作平台完成任务时,系统会记录机械臂系统、视觉系统、移动底盘的数据,后续可以将这些数据进行训练,使机器人能够进行迁移学习,最终学会自主完成场景任务。
1.3、实验课程
| 主题 | 课程 | 内容目录 |
|---|---|---|
|
ALOHA具身智能 |
机械臂系统实训 |
1.六轴机械臂简介及本体认知; 2.六轴机械臂通讯方法; 3.六轴机械臂示教器使用基础; 4.机械臂设计实践; 5.机械臂正逆运动学实践; 6.机械臂运动控制实践; 7.机械臂路径规划实践; 8.机械臂碰撞检测实践; 9.机械臂示教实践; 10.机器人操作系统ROS实践; 11.Gazebo仿真实践; 12.Moveit轨迹规划实践; 13.机械臂抓取实践; 14.3D感知场景规划实践; 15.双臂协同物体抓取应用实践; |
|
ALOHA具身智能 双臂数据收集平台教学实训 |
移动底盘实训 |
1.底盘结构拆装实践; 2.机电系统拆装实践; 3.底盘运动控制实践; 4.嵌入式开发实践; 5.ROS操作系统实践; 6.Gazebo仿真实践; 7.RVIZ仿真实践; 8.MoveBase应用实践; 9.传感器融合实践路径; 10.SLAM定位导航实践; 11.路径规划开发实践; |
|
ALOHA具身智能 |
视觉系统实训 |
1.视觉传感器简介及分类; 2.视觉传感器优缺点分析; 3.视觉传感器应用场景分析; 4.深度相机简介及基础使用; 5.深度相机获取三维坐标; 6.深度学习简介; 7.Opencv简介及环境安装; 8.基于Opencv的颜色识别实践; 9.基于Opencv的二维码识别实践; 10.手眼标定的意义; 11.使用Python实现基于六轴机械臂的手眼标定; |
|
ALOHA具身智能 |
ALOHA系统实训 |
1.主从臂操作实践; 2.平台移动控制实训; 3.示教模式移动控制任务实践; 4.ALOHA示教数据采集; 5.示教数据迁移学习; 6.ALOHA 数据集联合训练; 7.ALOHA具身智能双臂数据收集平台自主任务; |
1.4、设备组成
(1)ALOHA具身智能双臂数据收集平台主要组成部件包括:AGV 移动底盘、激光雷达、两个六轴机械臂、工控机、相机模组、遥控组件(两个同构主臂)。
(2)机械臂系统:主机械臂采用睿尔曼03关节组成,结构上与RM65同型,能够实时监控关节转动数据,方便后续将数据映射给从臂。从机械臂采用睿尔曼 RM65 系列超轻量机械臂,负载 5kg 自重 7.2kg 具有超高的负载自重比,无传统控制柜将控制器与机械臂完美融为一体,一体化机械臂仍自带丰富接口满足多种应用需求扩展,提供丰富的 API 函数库,便于二次开发。末端具备通用接口,灵活扩展,即插即用,一体化机械臂结构且自带丰富接口,满足多行业应用需求扩展。
(3)视觉系统:选用Intel Realsense D435 深度相机,可直接通过 USB3.0 供电和数据通信,能同时获取深度图像与彩色图像,有效距离 0.11m~10m,可满足视觉感知环境需求。在从臂末端关节处都安装有Intel Realsense D435相机,便于识别任务环境以及精确任务目标,支撑平台上也设有一个Intel Realsense D435相机,监控全局环境。
(4)移动底盘:采用松灵 tracer 移动底盘,它是⼀款采用模块化、智能化的设计理念的多功能模块化的行业应用移动机器⼈开发平台,具有强大载荷能力和强劲动力系统的它有广泛的应用领域。两轮差速的和伺服电机的搭配使得它能够在室内灵活运动。立体相机、激光雷达、GPS、IMU、机械手等设备可选择加装至 TRACER 作为扩展应用。
(5)主控系统:使用 i9-13900K,4090 24G 显卡,64G DDR5 ,2TSSD+2THDD 算力主控,主控模块是整个系统的控制中枢,主要负责给移动底盘、机械臂及其末端执行器发送指令,同时负责机器人系统各模块间的通讯。使用者可以在此主控控制从臂以及二次开发。
(6)电动夹爪:选取 EG2-SF16 电动夹爪,舍弃气动夹爪,符合系统设计小巧、美观的原则,避免线缆和设备过多,将执行器直接集成在机械臂末端,与机械臂完成一体化运动控制。
1.5、主要技术参数
(1)工作电压:DC24V
(2)末端输出:DC5V
(3)平台高度:
(4)安全保护:碰撞检测、紧急停止等功能
(5)对外接口:网口、USB口、HDMI
(6)二次开发接口:python、json、matlab、ROS
二、主要配置介绍
2.1、机械臂
从臂使用睿尔曼RM65-B仿人机械臂执行场景任务,RM65-B自重7.2Kg,额定负载5Kg,臂展610mm,重复定位精度±0.05mm,具有一体化结构控制器,搭载在机器人上能够完美契合“人形”的概念。其示教方式极其方便,可通过网线和wifi方式连接机械臂,通过访问机械臂本体IP,即可完成示教界面的访问。

(机械臂本体与示教界面)
主要技术参数:
(1)控制轴数:6轴
(2)有效负载:5kg
(3)机械臂净重:7.2kg
(4)控制器:与机械臂一体化
(5)重复定位精确度:±0.05mm
(6)有效工作半径:610mm
(7)供电电压:DC24V
(8)工作温度:-15℃~55℃
(9)工作湿度:10%~80%,且无凝露
(10)通信接口: Ethernet/WIFI/RS485
(11)I/O接口:数字输出:4路、数字输入:3路、模拟量输出:4路(0-10V电压)、模拟量输入:4路(0-10V电压)
(12)示教方法:平板/电脑
(13)运动范围:关节1转动范围:±178°,关节2转动范围:±130°,关节3转动范围:±135°,关节4转动范围:±178°,关节5转动范围:±128°,关节6转动范围:±360°
(14)关节最大速度:J1-J2 180°/s、J3-J6 225°/s
(15)功耗:最大功耗≤200W 综合功耗≤100W
(16)防护等级:IP54(机械臂本体)
主机械臂采用RM03关节组成,结构上与RM65同型,能够实时监控关节转动数据,方便后续将数据映射给从臂。
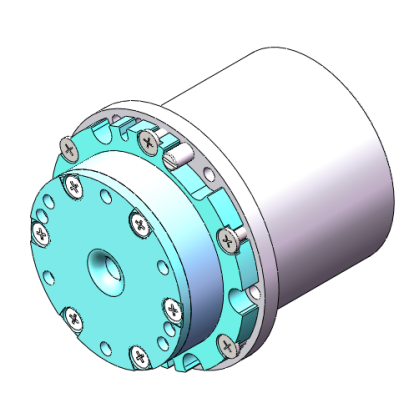
主要技术参数:
(1)减速比:100
(2)启停峰值扭矩:9Nm
(3)额定扭矩:3Nm
(4)瞬间容许最大扭矩:9Nm
(5)输出端峰值转速(RPM):30
(6)电机功率(W):25
(7)制动器:软抱闸
(8)外径×长度(mm):44×46
(9)重量(Kg):0.19
(10)供电电压(V):24±10%
2.2、深度视觉系统
深度视觉系统选用 Intel Realsense D435深度相机,可直接通过 USB3.0 供电和数据通信,能同时获取深度图像与彩色图像,并且提供开发SDK和ROS功能包,方便使用者实时获取相机图像数据,并且兼容常见操作系统与机器人运行系统,便于使用者者快速进行二次开发。

主要技术参数:
(11)环境:室内和室外
(12)深度技术:主动IR立体
(13)组件:英特尔®实感™视觉处理器D4/英特尔®实感™模块D435
(14)深度视野(横向×纵向×对角线):91.2°×65.5°×100.6°
(15)深度流输出分辨率:达1280×720
(16)深度流输出帧速率:达90fps
(17)最小深度距离(Min-Z):0.2米
(18)红外信号发射器功率:可配置至达425毫瓦(mW)
(19)图像传感器类型:全局快门
(20)最大范围:10米及更远,随校准、场景、光照条件而变
(21)RGB传感器分辨率和帧速率:30fps时为1920×1080
(22)RGB传感器视野(横向×纵向×对角线):69.4°×42.5°×77°
2.3、移动底盘
使用松灵TRACER作为移动底盘,TRACER一款两轮差速AGV, TRACER 是⼀款全能型行业应用UGV(UNMANNED GROUND VEHICLE)。它是⼀款采用模块化、智能化的设计理念的多功能模块化的行业应用移动机器人开发平台,具有强大载荷能力和强劲动力系统的它有广泛的应用领域。两轮差速的和轮毂电机的搭配使得它能够在室内灵活运动。立体相机、激光雷达、GPS、IMU、机械手等设备可选择加装至TRACER 作为扩展应用。TRACER可被应用到无人巡检、科研、物流等领域。在室内运输领域具有独特的优势,小巧灵活的结构使得它能自由穿梭在各种室内环境,高承载能力及强劲动力搭配使它单次搬运效率有极大的优势,搭配感知系统更能自主运行,成本低、效率高、部署快,是室内运输场景的性价比之王。

主要技术参数:
(1)长×宽×高(mm):685 X 570X 155
(2)轴距(mm):360
(3)整备重量:28~30Kg
(4)电池类型:锂电池
(5)电池参数:24V 15Ah
(6)动力驱动电机:直流无刷 2 X 150W
(7)转向形式:差速转向
(8)重量:30Kg
(9)负载:100Kg
(10)防护等级:IP22
(11)最高速度(m/s):1.8
(12)最小转弯半径(mm):可原地转弯
(13)最大爬坡能力(°):8°
(14)离地间隙(mm):30
(15)最大续航时间(h):8
(16)最大行程(km) :40
(17)充电时间(h):2
(18)工作温度(℃):-10~40℃
(19)控制模式:遥控控制、指令控制模式
(20)遥控器:2.4G/极限距离 200M
(21)通讯接口:CAN
2.4、电动夹爪
选取EG2-SF16电动夹爪,舍弃气动夹爪,符合系统设计小巧、美观的原则,避免线缆和设备过多,将执行器直接集成在机械臂末端,与机械臂完成一体化运动控制。该夹爪内部集成了 1 个直线伺服驱动器,用户接口采用 RS485 通信接口,内置灵敏的压力传感器,通过设置不同的压力阈值方便用户进行不同硬度物体的夹取。这款夹爪可设置爪子张合时的速度、力度、位置。其中速度设置范围为 0~255, 力度设置范围为 0~255,位置设置范围为 0~255。电动夹爪最大开口为 70 毫米, 最高可实现 1.5Kg 的夹持力。

主要技术参数:
(1)通信接口:RS485
(2)总行程(两侧):70mm
(3)重量:231g
(4)夹持力:0~20N
(5)工作电压: DC24V±10%
(6)峰值电流:0.7A
(7)重复定位精度:±0.5mm
(8)最大速度:70mm/s
(9)防护等级:IP40
2.5、主控
使用 i9-13900K,4090/ 24G 显卡,64G DDR5 ,2TSSD+2THDD 算力主控,主控模块是整个系统的控制中枢,主要负责给移动底盘、机械臂及其末端执行器发送指令,同时负责机器人系统各模块间的通讯。使用者可以在此主控控制从臂以及二次开发。

三、配置清单一览表
| 序号 | 产品名称 | 规格型号 | 数量 | 单位 |
|---|---|---|---|---|
| 1 | 从机械臂 | RM65-B | 2 | 套 |
| 1 | 主机械臂 | RM定制 | 2 | 套 |
| 1 | 机械臂示教器 | 配套 | 1 | 套 |
| 2 | 主控 | - | 1 | 套 |
| 3 | 相机 | RealsenseD435C | 3 | 套 |
| 4 | 移动底盘 | TRACER | 1 | 套 |
| 5 | 电动夹爪 | EG2-SF16 | 2 | 套 |
四、方案提供商
4.1、公司简介
睿尔曼是一家专注于超轻量仿人机械臂研发、生产及销售的国家高新技术企业,总部位于北京市石景山首特产业园,工厂建于江苏省常州科教城智能数字产业园内,下属另设有睿尔曼智能科技(深圳)有限公司全资子公司。公司集研发、生产、办公于一体,年综合产能20000 台以上。
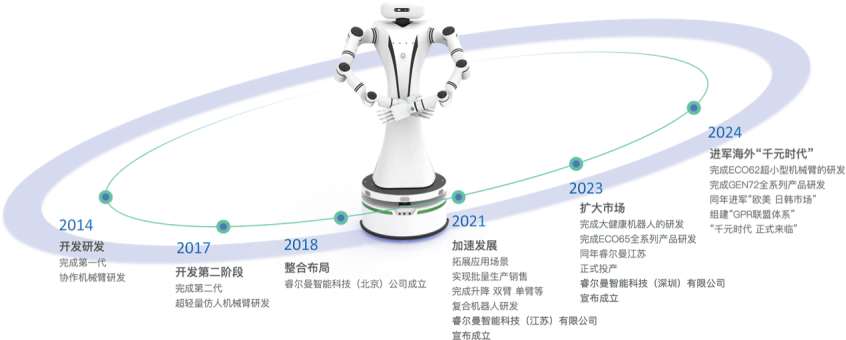
自2010年起,睿尔曼便踏上了超轻量仿人机械臂的创新之旅,作为该领域的引领者,它始终坚守着产品研发与技术创新的初心。其核心团队汇聚了中国早期机器人底层技术研发的精英,他们在这一领域深耕细作,积累了超过十年的深厚底蕴和丰富经验。正是这样的团队,能够从基因层面进行机械臂的原型设计和底层零部件的自主研发,从而在控制器、驱动器、电机、减速器这四大核心零部件上实现了革命性的突破,打造出具有完全自主知识产权的超轻量仿人机械臂。
如今,睿尔曼的产品已广泛应用于新零售、新餐饮、商业服务、智能巡检、医疗健康、检验检疫、教育科研、工业生产、航空航天等多个领域,其智能、通用模块化的机械臂本体,融合了先进的软硬件与人机交互技术,为客户提供了高性价比、高可靠性、易操作的超轻量仿人机械臂及集成解决方案。
睿尔曼不仅拥有多年的机器人产品研发经验,更与北京航空航天大学、北京理工大学、中国农业大学等多所知名高校建立了紧密的战略合作关系,共同搭建了一个全方位、专业互补的创新研发平台。它始终怀揣着一个梦想:致力于让机械臂成为通用的智能化工具,让机器人走入千家万户,为美好生活助一臂之力!
4.2、公司资质
北京市“专精特新”中小企业

高新技术企业

world检测认证


质量管理体系认证
CE认证

可靠性检测认证
已申请专利113项、发明专利57项、实用新型专利25项、授权专利45项、外观专利7项。
4.3、产学合作
睿尔曼高度重视产学合作,旨在为各层次、各类型高校提供全套一站式解决方案与建设方案,目前已和清华大学、北京大学、中山大学等高校建立合作关系,以下是部分合作院校和合作案例。

合作案例(部分)
合作单位:北京石油化工学院——人工智能研究院
合作项目:高质量应用型“人工智能”应用技术实验实训基地建设—智能机器人


合作单位:哈尔滨远东理工学院
合作项目:机器人实训室建设






撰写评论