

【睿尔曼-RealMan】智慧医疗工作站——技术方案
Alvin 2024-04-15

一、功能概述
1.1、功能简介
智慧医疗工作站是一款集成机械臂、末端执行器、边缘计算平台等机构形成的实训平台,可实现从采样、装瓶、开盖、提取、分装到送检全流程自动化运行功能和应用,为医疗实验与教学实训提供智慧医疗场景案例和开放式的软件框架,支持用户针对使用场景进行特定应用开发。平台各部件尽量采用一体化集成设计,方便维护,节省空间;拥有方便易懂的人机交互界面,便于学习者能够更快的了解系统;提供多种二次开发形式,便于使用者快速利用平台适配自己的方案内容。
智慧医疗工作站可开展虚拟仿真及真实场景实验,满足机器人操作系统及机器人运动学等课程教学实训要求,并支持专业实训、课程设计、毕业设计等实训环节的教学,契合高校机器人工程、人工智能等专业建设需求;此外,智慧医疗工作站具备强劲综合性能和广泛适用性,能够快速配置于医疗实验室,辅助医疗实验测试,助力生物医疗实验室创新。
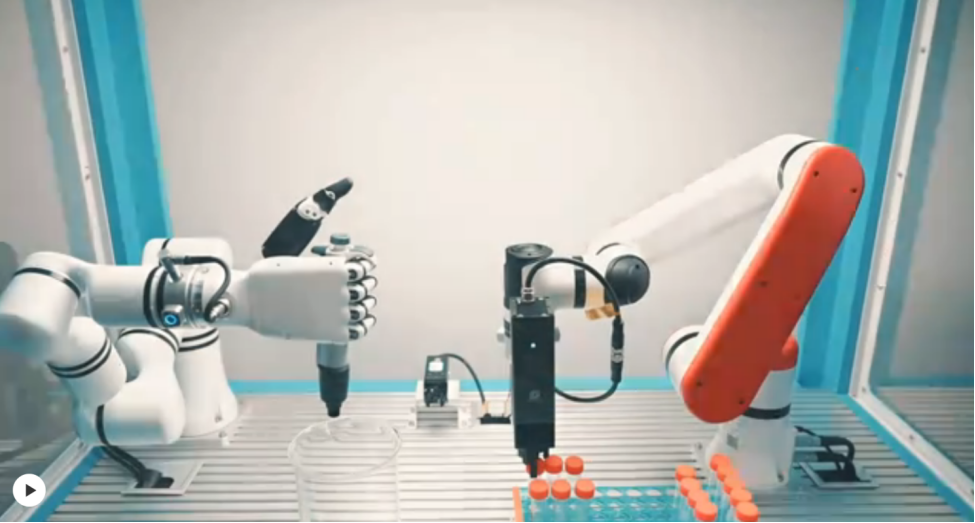
(智慧医疗工作站技术实训平台、图片仅供参考)
1.2、产品应用案例
智慧医疗工作站针对自动化医疗实验室建设、智慧医疗专业教学等应用场景,提供一体化全栈解决方案,实现无人实验室、医学专业实训等场景应用。

(智慧医疗实验室)
1.3、产品特点
1.3.1、产品背景
自动化实验室,是一种可以极大程度提高现代实验室工作效率、减少流程、提升准确性的有效解决方案。回顾三年疫情,面对激增的检测样本数量,对样品检测效率和样品检测准确性同时提出了极高要求,因此催生了大量的自动化、高度集成的仪器设备的生产,例如全自动移液工作站、全自动核酸检测仪器等,这也为大量高通量检测积攒了实际经验。可以预见,未来,自动化实验将成为国内各大科研机构、医学仪器制造等行业关注的热点技术。
2023年1月 《“机器人+”应用行动实施方案》大力推进生物医疗实验室创新项目建设,无论是企业单位、科研院校还是政府部门,都以各种形式积极响应号召。一直以来,创新、融合这两大主题是医疗实验室自动化发展的方向,随着自动化技术日新月异发展,从逐步替代传统实验室的旧设备到如今走向开拓创新,面对竞争激烈的市场环境,许多具备医疗场景解决方案研发的企业蓄势待发。
智慧医疗工作站针对实验室医学检验的需求,实现从采样、装瓶、开盖、提取、分装到送检全流程自动化运行,并采用密封装置封闭传动机构对外部环境的污染,以适应高洁净度的医疗环境需求。其具有人工智能操控、仿生灵巧手、模块化多关节等特点,为精确化、个体化、智能化实验提供有力的保障,也能够更好地满足实验室对洁净度的迫切需求。
1.3.2、产品优势
智慧医疗工作站装备仿人机械臂与灵巧手,灵活模仿实验人员手部动作,例如:抓取试管,摇晃等动作,让“单人”操作完成上千份试剂实验样品成为可能。全程无菌操作,减少人员感染的可能性,满足高洁净度的需求,而且操作简单,也可以远程监控,提高相对劳动价值,具有巨大的商业价值。同时,可以适应多场景运用,也可以适用于不同直径的培养瓶以及人手操作的设备。除此之外,实训平台执行机构各部件定位精度误差不超过±0.05mm,保证实验的稳定性。每个关节搭载高精度电流环传感器,配合高灵敏度的碰撞检测功能,人机协作更安全。在编程示教上,一键实现的轻便拖动,用户可以直接示教点位和轨迹编程,操作简易又便捷。
智慧医疗工作站同时具备商业应用、教学实训及科研实验的特性,是融合应用与科教一体的平台,支持各类型高校专业实训、课程设计、毕业设计等实训环节的教学,其主要优势如下:
(1)可拓展性:智慧医疗工作站采用模块化思想,分布式构建实训平台,便于后续拓展各部件与功能应用。
(2)灵活性:智慧医疗工作站的机械臂结构设计灵活,可以在不同工作场景下自由移动和操作,适用于多种实验和项目需求。
(3)自动化程度高:智慧医疗工作站具备自动化控制功能,能够通过编程实现自动化操作和任务执行,提高实验效率和精度。
(4)易用性:智慧医疗工作站具备全面的配套设施,并且各部件都基于人员操作习惯开发,遵循易用性与易开发性设计理念。
(5)实践创新教学:智慧医疗工作站为学生提供了实践创新的平台,可以进行项目设计、编程控制、系统集成等实践操作,培养学生的创新能力和实践技能。
(6)设备迭代更新:智慧医疗工作站采用模块化组成思想,每个组成部分都能够单独运行使用,因此后续升级与适配十分方便,用户无需整套返厂更新,使用配套器件即可更新硬件与软件。传统工科实训设备通常处于固定安装状态,设备使用效果具有“时效性”。
(7)教学资料配套:智慧医疗工作站配套各类型教学资料,包括实训文档、开发文档、实训讲解视频、二次开发实践视频以及实践讲师现场教学等全面的教学支撑,为客户群体提供人性化与定制化的使用与开发服务。
(8)实训平台生态圈:智慧医疗工作站提供全方位的生态圈,用户可自行定制与替换各部件,以便完成特定的场景需求,并且智慧医疗工作站拥有独立的产品生态论坛,用户可以随时在论坛查找相关生态产品资料以及开发资料,极大地减少客户二次开发应用难度及周期。
1.4、配套资源
智慧医疗工作站配套全面的实训内容与资料,为教育客户群体提供涵盖机器人工程、人工智能、自动化等专业的课程教学与实训实验资源,并且提供产品论坛,用户可在论坛中交流与查找相关资料,产品的更新资料也会同步至论坛中,方便用户查收。
1.4.1、课程资源
智慧医疗工作站提供系统性的教学实验实训内容,包括实训文档及实训视频,深入浅出的讲解智慧医疗工作站相关原理与开发流程,以下是部分课程资源概览:
| 主题 | 课程 | 内容(简述) | 课时 |
|---|---|---|---|
|
中控系统教学实训 |
Linux系统基础 |
1.Linux系统说明;
2.Linux系统安装;
3.常用Linux命令说明;
|
4 |
|
中控系统教学实训 |
Python基础 |
1.Python语言说明;
2.Python环境搭建;
3.Python基础语法;
4.Python数据类型;
5.Python函数说明;
6.Python中Socket网络编程;
|
4 |
|
中控系统教学实训 |
ROS操作系统 |
1.ROS简介及ROS总体框架;
2.ROS安装及测试;
3.ROS中话题topic、服务Service、消息等介绍;
4.基于C++编写各节点;
5.Launch文件说明及使用;
6.TF变换说明;
7.Rqt、RVIZ、Gazebo、Cvbridge工具介绍;
|
16 |
|
操作机构系统教学实训 |
执行机构本体 |
1.六轴机械臂简介及本体认知;
2.六轴机械臂通讯方法;
3.六轴机械臂示教器使用基础;
4.六轴机械臂示教器编程;
|
8 |
|
操作机构系统教学实训 |
机械臂仿真系统 |
1.ROS机器人操作系统简介及认知;
2.RVIZ中显示机械臂模型;
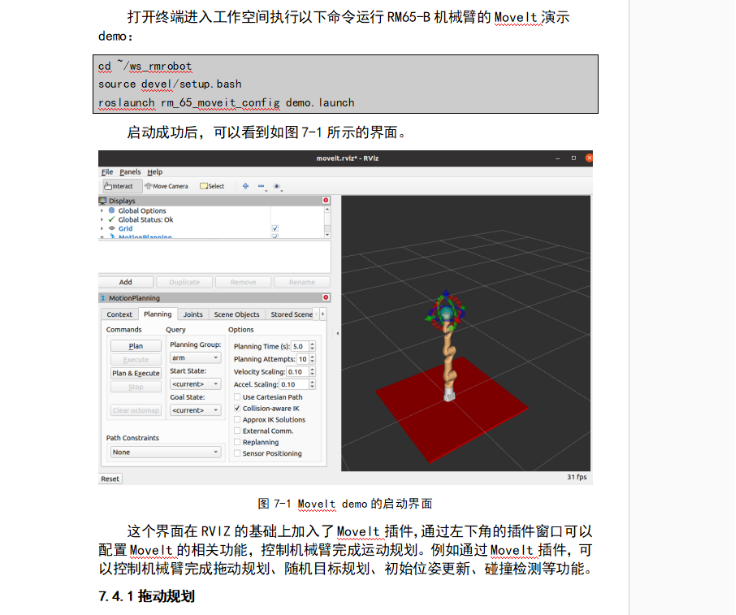
3.使用Moveit工具编程;
4.Moveit控制Gazebo中的仿真机械臂;
5.Moveit仿真避障规划;
|
16 |
|
操作机构系统教学实训 |
执行机构二次开发 |
1.JSON协议应用;
2.机械臂API应用;
3.机械臂透传移动控制;
4.在线编程及拖动轨迹文件编程;
|
16 |
|
操作机构系统教学实训 |
执行机构集成技术 |
1.机械臂控制器对外接口应用;
2.机械臂末端对外接口应用;
3.机械臂集成五指灵巧手应用;
4.机械臂集成电动夹爪应用;
|
8 |
1.4.2、可开展实训内容
(1)实训台组成原理:智慧医疗工作站通识;
(2)安全规范:智慧医疗工作站实训安全操作规范;
(3)机械臂使用:机械臂基本运动指令和TCP标定讲解及练习;
(4)操作流程:智慧医疗工作站运行流程示范与操作;
(5)机械臂控制:机械臂语言动作指令编程、外部IO控制、外部轴集成协同控制;
(6)机械臂运动学与动力学:深入理解机械臂的结构、运动学和动力学原理,以及如何应用这些知识进行精确控制和运动规划;
(7)机器人操作系统:基于智慧医疗工作站平台学习机器人操作系统ROS(Robot Operating System)与ROS2,掌握ROS通信原理,机器人功能开发原理,并利用ROS进行机器人虚拟仿真实验与真实控制;
(8)机器人二次开发:通过机器人各部分API接口、开放外部接口与ROS开源功能包适配各类外部器件,完成指定场景应用与特定功能实现;
1.4.3、教学资源与平台
智慧医疗工作站提供由浅入深的二次开发教学资源以及开发平台,用户可在官网论坛查找相关产品资料,并且开发人员会在论坛中分享二次开发示例源码、开发原理及经验,为用户提供二次开发的技术帮助。
部分教学资源截图如下:

(教学资源图1 机械臂实训手册)
(教学资源图2 机械臂ROS实训手册)

(教学资源图3 机械臂实训教学资料)

(教学资源图4 基础教学资料)
(教学资源图5 夹爪实训教学资料)
在提供全套的实训资料外,还设置了产品论坛,旨在方便客户及时获取产品最新资料以及二次开发案例,全力辅助用户二次开发,形成良好的产品拓展与开发氛围。

(论坛资源图)
1.5、设备组成
(1)智慧医疗工作站技术实训平台是专门面向医疗实验室的教学实训平台。学生可以利用平台学习掌握智慧医疗工作站理论知识,并在现有工作台上验证,帮助学生从理论知识上升到实际操作。此外,行业人员可以依托平台建设自动化智慧实验室,极大地减少繁杂重复的实验操作,提高医疗实验效率。
(2)机械臂系统:机械臂系统由RM65-B与ECO65-B超轻量机械臂组成,两款机械臂均能负载5kg,具有超高的负载自重比,无传统控制柜将控制器与机械臂完美融为一体,一体化机械臂仍自带丰富接口满足多种应用需求扩展,提供丰富的API函数库,便于二次开发。末端具备通用接口,灵活扩展,即插即用,一体化机械臂结构且自带丰富接口,满足多行业应用需求扩展。
(3)主控系统:使用Nvidia Jetson XAVIER NX 模组,该模组预装Ubuntu18.04 系统,配备6核Carmel架构@V8.2 64bit CPU,384 核Volta 架构的GPU及48个 TensorCore,能带来 21TOPS的INT8运算能力,尺寸只有90mm*103mm*35mm。主控模块是整个系统的控制中枢,主要负责给各部件发送指令,同时负责机器人系统各模块间的通讯。使用者可以在此主控控制智慧医疗工作站以及二次开发。
(4)电动夹爪:选取ERG32-150和EPG26-015电动夹爪,舍弃气动夹爪,符合系统设计小巧、美观的原则,避免线缆和设备过多,将执行器直接集成在机械臂末端,与机械臂完成一体化运动控制。
(5)五指灵巧手:仿人五指灵巧手采用因时RH56BFX,该灵巧手集成了6个微型伺服电缸,用户接口采用 RS485通信接口,内置灵敏的压力传感器,通过设置不同的阈值方便用户进行不同硬度物体的抓取,简洁高效的接口控制指令可使用户快速实现对灵巧手的操控,优质的性能使该灵巧手应用于服务机器人、教学教具、假肢等领域。
1.6、主要技术参数
(1)供电电源:220V
(2)工作电压:DC24V
(3)平台尺寸:高161*长118*宽58cm
(4)安全保护:紧急停止
(5)对外接口:网口、USB口、HDMI

1.7、工作流程
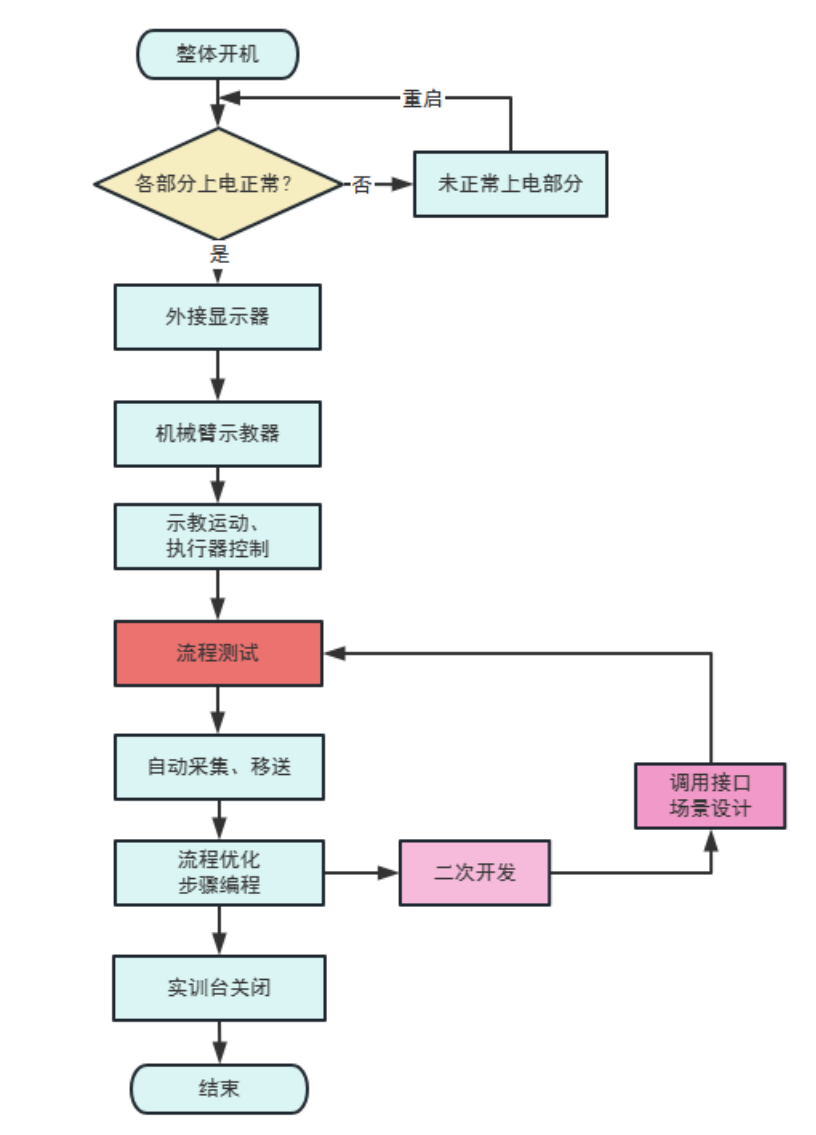
(流程图、仅供参考)
二、主要配置介绍
2.1、机械臂系统
机械臂系统由RM65-B与ECO65-B组成,RM65-B主要负责采液、移液功能,ECO65-B主要负责移送试管、配合RM65-B进行采液。
RM65-B仿人机械臂自重7.2Kg,额定负载5Kg,臂展610mm,重复定位精度±0.05mm,具有一体化结构控制器,搭载在机器人上能够完美契合“人形”的概念。其示教方式极其方便,可通过网线和wifi方式连接机械臂,通过访问机械臂本体IP,即可完成示教界面的访问。

(超轻量仿人机械臂本体与示教界面)
主要技术参数:
(1)控制轴数:6轴
(2)有效负载:5kg
(3)机械臂净重:7.2kg
(4)控制器:与机械臂一体化
(5)重复定位精确度:±0.05mm
(6)有效工作半径:610mm
(7)供电电压:DC24V
(8)工作温度:0℃~45℃
(9)工作湿度:10%~80%,且无凝露
(10)通信接口: Ethernet/WIFI/RS485
(11)I/O接口:数字输出:4路、数字输入:3路、模拟量输出:4路(0-10V电压)、模拟量输入:4路(0-10V电压)
(12)示教方法:平板/电脑
(13)运动范围:关节1转动范围:±178°,关节2转动范围:±130°,关节3转动范围:±135°,关节4转动范围:±178°,关节5转动范围:±128°,关节6转动范围:±360°
(14)关节最大速度:J1-J2 180°/s、J3-J6 225°/s
(15)功耗:最大功耗≤200W 综合功耗≤100W
(16)防护等级:IP54(机械臂本体)
ECO65-B机械臂为提升有效工作范围,提升实训台的工作效率,采用协作型架构,拥有比RM65-B更广的运动范围,能够完成绝大多数执行动作。

主要技术参数:
(1)控制轴数:6轴
(2)有效负载:5kg
(3)机械臂净重:7.8kg
(4)控制器:与机械臂一体化
(5)重复定位精确度:±0.05mm
(6)有效工作半径:610mm
(7)供电电压:DC20-30V 额定DC24V
(8)通信接口: Ethernet/WIFI/RS485/蓝牙
(9)I/O接口:数字输出:4路、数字输入:3路、模拟量输出:4路(0-10V电压)、模拟量输入:4路(0-10V电压)
(10)示教方法:平板/电脑
(11)运动范围:关节1转动范围:±178°,关节2转动范围:±135°~178°,关节3转动范围:±145°~160°,关节4转动范围:±178°,关节5转动范围:±178°,关节6转动范围:±360°
(12)关节最大速度:J1-J2 180°/s、J3-J6 225°/s
(13)功耗:最大功耗≤200W 综合功耗≤100W
(14)防护等级:IP54(机械臂本体)
(15)材质:铝合金
2.2、电动夹爪
电动夹爪由钧舵ERG32-150和EPG26-015两部分组成,ERG32-150集成在ECO65-B机械臂末端,执行抓取试管等操作,EPG26-015固定在实验操作台上,
钧舵ERG32-150旋转电伺服电动夹爪是为工业自动化应用场景设计的专用夹持设备,通过位置、速度、力的控制,电动夹爪可适应不同形状与尺寸的被抓物体,无需更换末端执行器,即可实现一手多用,提升了机器人在3C电子、汽车制造、物流、食品、医疗等各个行业的抓取与操作能力。同协作机器人手臂、主流工业机器人软硬件简易集成,实现“即插即用”,相比于传统的抓取方案更加方便快捷。ERG32-150 旋转电伺服电动夹爪具有两个安装手指的端口,上端手指可更换,电动夹爪由2个伺服电机驱动,这种配置使手指能够自动适应其握住的物体的形状,并且还简化了对电动夹爪的控制。

主要技术参数:
(1)可调行程:0~26mm
(2)单指夹持力:1~15N
(3)打开/闭合时间:3S
(4)位置重复精度:±0.02mm
(5)最大推荐负载:3Kg
(6)掉落检测:支持
(7)使用环境:5~40℃,85%RH以下
(8)运行噪音:<40dB
(9)本体重量:0.25Kg
(10)IP等级:IP40
(11)额定电压:DC 24V±10%
(12)最大电流:0.85A
(13)额定电流:0.4A
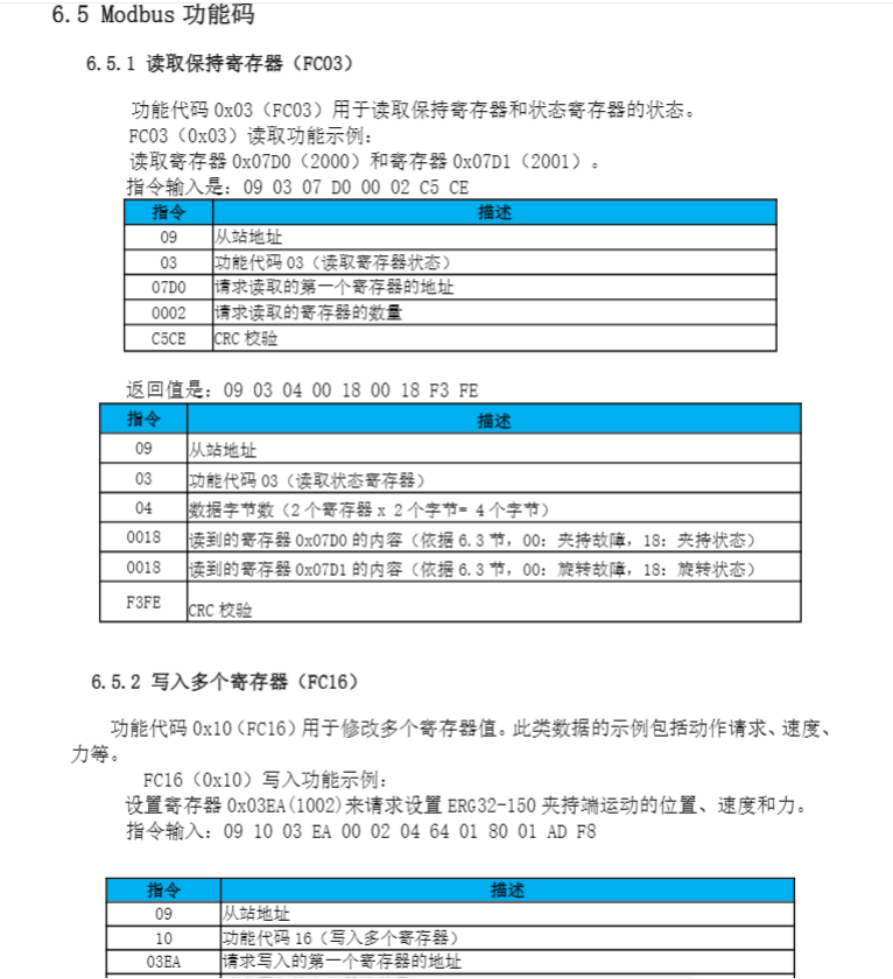
(14)通信协议:Modbus RTU(RS 485)
(15)垂直方向容许静负载Fz:150N
EPG26-015是钧舵自主研发生产的工业平行电爪,以其精准力控、体积小巧、快速响应,是工业电动夹爪领域热门产品。

主要技术参数:
(1)可调行程:0-26 mm
(2)单指夹持力:1-15 N
(3)打开/闭合时间:0.3 s
(4)位置重复精度:±0.02 mm
(5)*最大推荐负载:0.3 Kg
(6)掉落检测:支持
(7)使用环境:5~40℃,85% RH以下
(8)运行噪音:<40 dB
(9)额定电压:DC 24±10% V
(10)最大电流:0.85 A
(11)额定电流:0.4 A
(12)通信协议:Modbus RTU(RS 485)
(13)IP等级:IP 40
2.3、主控
主控模块是整个系统的控制中枢,采用Nvidia Jetson XAVIER NX 模组,该模组预装Ubuntu18.04 系统,配备6核Carmel架构@V8.2 64bit CPU,384 核Volta 架构的GPU及48个 TensorCore,能带来 21TOPS的INT8运算能力,尺寸只有90mm*103mm*35mm。

主控主要负责以下功能:
(1)与用户通过WIFI通信,接收用户指令,上传系统状态;
(2)通过USB3.0接收视觉传感器,对目标物体进行识别和定位;
(3)通过网口与机械臂通信,发送机械臂控制指令,获取机械臂状态信息;
(4)通过网口与移动底盘通信,发送底盘控制指令,获取底盘状态信息。
2.4、灵巧手
仿人五指灵巧手采用因时RH56BFX,其采用直线驱动设计,内部集成了6个力控微型伺服电缸。单手具有6个自由度和12个运动关节,结合力位混合控制算法,具有亚毫米级定位精度和数千克的负载能力。产品内部集成了6个力传感器,可以实时反馈手指的受力情况,手指采用欠驱动结构设计,同时具有被动保护机构,能够被动卸载来自指背的弯曲力,保护结构安全。产品采用标准工业总线协议,接口兼容性强,方便与肌电采集系统或机器人控制系统连接使用,且内嵌20多个标准动作库,方便使用。

主要技术参数:
(1)自由度:6
(2)关节:12个运动关节
(3)建议供电电压:24V
(4)最大电流:2A
(5)重量: 540g
(6)控制接口:RS485
(7)静态电流:0.2A
(8)重复定位精度(mm):±0.2
(9)最大抓握力:拇指6N/四指4N
三、配置清单一览表
| 序号 | 产品名称 | 规格型号 | 数量 | 单位 |
|---|---|---|---|---|
| 1 | 机械臂 | RM65-B | 1 | 套 |
| 1 | 机械臂 | ECO65-B | 1 | 套 |
| 1 | 机械臂示教器 | 配套 | 1 | 套 |
| 2 | 电动夹爪 | ERG32-150 | 1 | 套 |
| 2 | 电动夹爪 | EPG26-015 | 1 | 套 |
| 3 | 灵巧手 | RM56DFX | 1 | 套 |
| 4 | 医疗实验配件 | 定制 | 1 | 套 |
| 5 | 主控 | Nvidia Jetson XAVIER NX | 1 | 套 |
| 6 | 电气配件 | - | 1 | 套 |
| 7 | 外壳 | 定制 | 1 | 套 |
| 8 | 显示器(选配) | - | 1 | 套 |
| 9 | 无线键盘鼠标(选配) | - | 1 | 套 |
四、方案提供商
4.1、公司简介
睿尔曼是一家专注于超轻量仿人机械臂研发、生产及销售的国家高新技术企业,总部位于北京市石景山首特产业园,工厂建于江苏省常州科教城智能数字产业园内,下属另设有睿尔曼智能科技(深圳)有限公司全资子公司。公司集研发、生产、办公于一体,年综合产能20000 台以上。
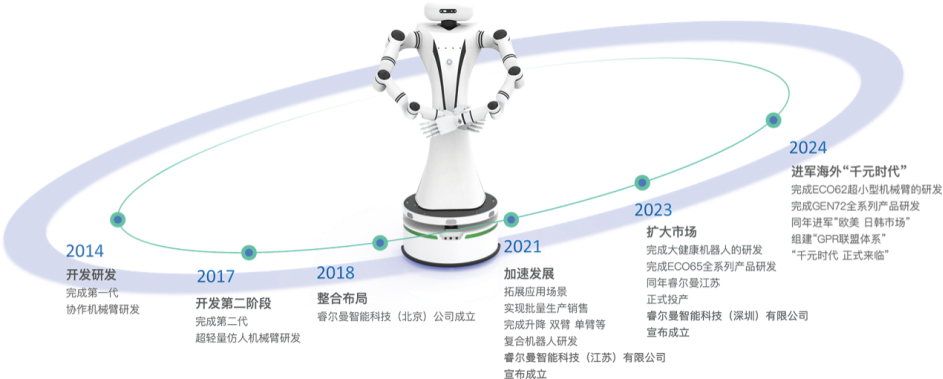
自2010年起,睿尔曼便踏上了超轻量仿人机械臂的创新之旅,作为该领域的引领者,它始终坚守着产品研发与技术创新的初心。其核心团队汇聚了中国早期机器人底层技术研发的精英,他们在这一领域深耕细作,积累了超过十年的深厚底蕴和丰富经验。正是这样的团队,能够从基因层面进行机械臂的原型设计和底层零部件的自主研发,从而在控制器、驱动器、电机、减速器这四大核心零部件上实现了革命性的突破,打造出具有完全自主知识产权的超轻量仿人机械臂。
如今,睿尔曼的产品已广泛应用于新零售、新餐饮、商业服务、智能巡检、医疗健康、检验检疫、教育科研、工业生产、航空航天等多个领域,其智能、通用模块化的机械臂本体,融合了先进的软硬件与人机交互技术,为客户提供了高性价比、高可靠性、易操作的超轻量仿人机械臂及集成解决方案。
睿尔曼不仅拥有多年的机器人产品研发经验,更与北京航空航天大学、北京理工大学、中国农业大学等多所知名高校建立了紧密的战略合作关系,共同搭建了一个全方位、专业互补的创新研发平台。它始终怀揣着一个梦想:致力于让机械臂成为通用的智能化工具,让机器人走入千家万户,为美好生活助一臂之力!
4.1、公司资质
北京市“专精特新”中小企业
高新技术企业

world检测认证

质量管理体系认证
CE认证
可靠性检测认证
已申请专利113项、发明专利57项、实用新型专利25项、授权专利45项、外观专利7
4.3、产学合作
睿尔曼智能高度重视产学合作,旨在为各层次、各类型高校提供全套一站式解决方案与建设方案,目前已和清华大学、北京大学、中山大学等高校建立合作关系,以下是部分合作院校和合作案例。
合作院校(部分)

合作案例(部分)
合作单位:北京石油化工学院——人工智能研究院
合作项目:高质量应用型“人工智能”应用技术实验实训基地建设—智能机器人


合作单位:哈尔滨远东理工学院
合作项目:机器人实训室建设






撰写评论