

【睿尔曼-RealMan】使用PLC通过MODBUS-TCP控制睿尔曼机械臂
Forrest 2024-04-12
机械臂型号:RML63-B ( RM 系列、ECO 系列、GEN 系列机械臂均可参考此教程)
控制器版本:1.5.0
环境:WIN10
PLC 型号:西门子 1200
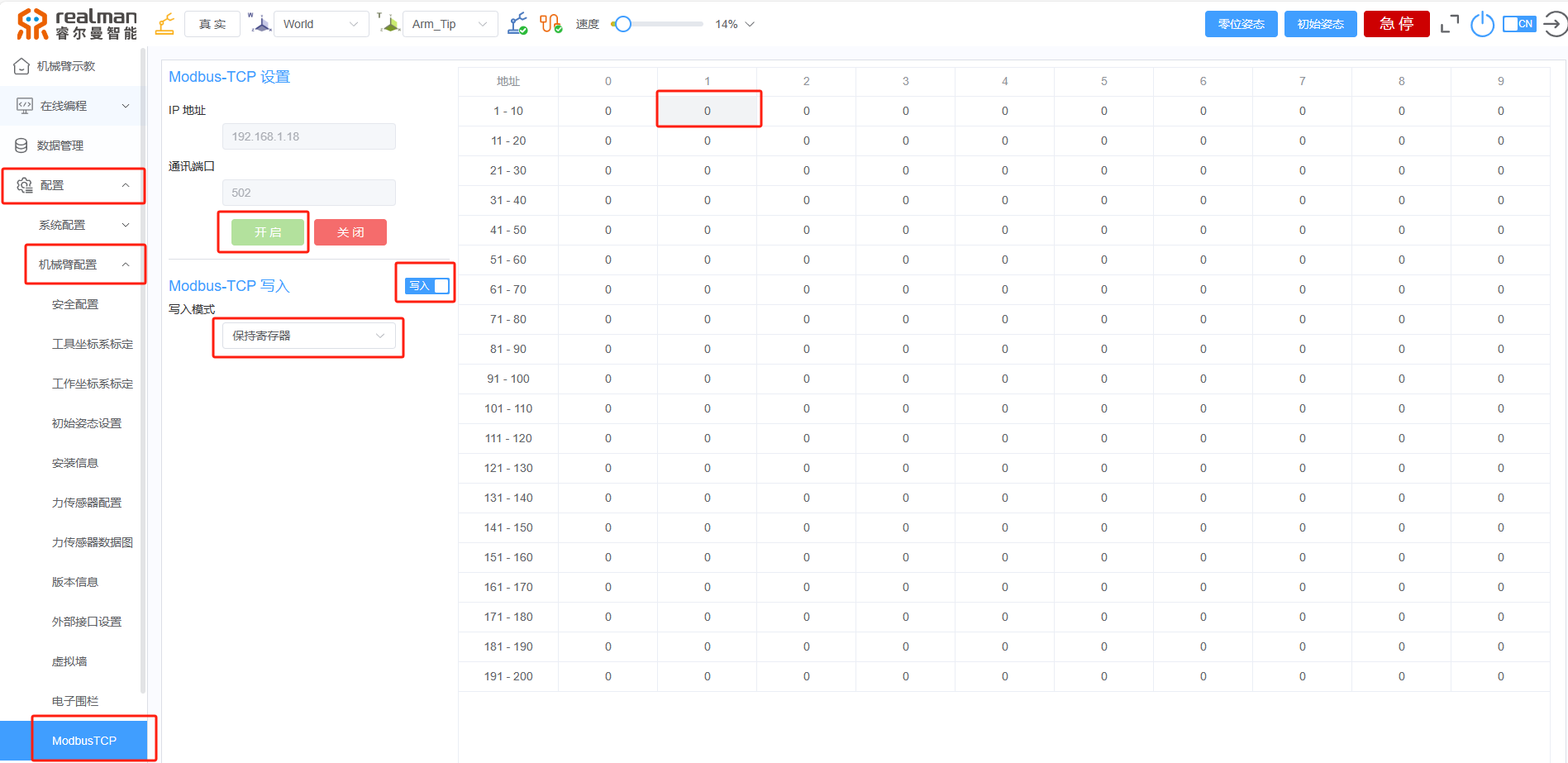
一、登录 WEB 示教器
参考链接:
睿尔曼机器人快速使用手册V1.5 - 睿尔曼智能论坛 (realman-robotics.cn)
https://bbs.realman-robotics.cn/question/117.html
1、创建在线编程
新建点位


长按示教按钮(+ - 箭头)即可控制机械臂运动
1.2、创建在线编程


1.3、保存图形化编程,输入名称、选择编号


1.4、编辑程序

1.5、编辑名称和默认速度

1.6、设为默认程序,可通过控制器复用 IO 触发

1.7、IO 触发设置方法:

二、使用示教器触发图形化编程:
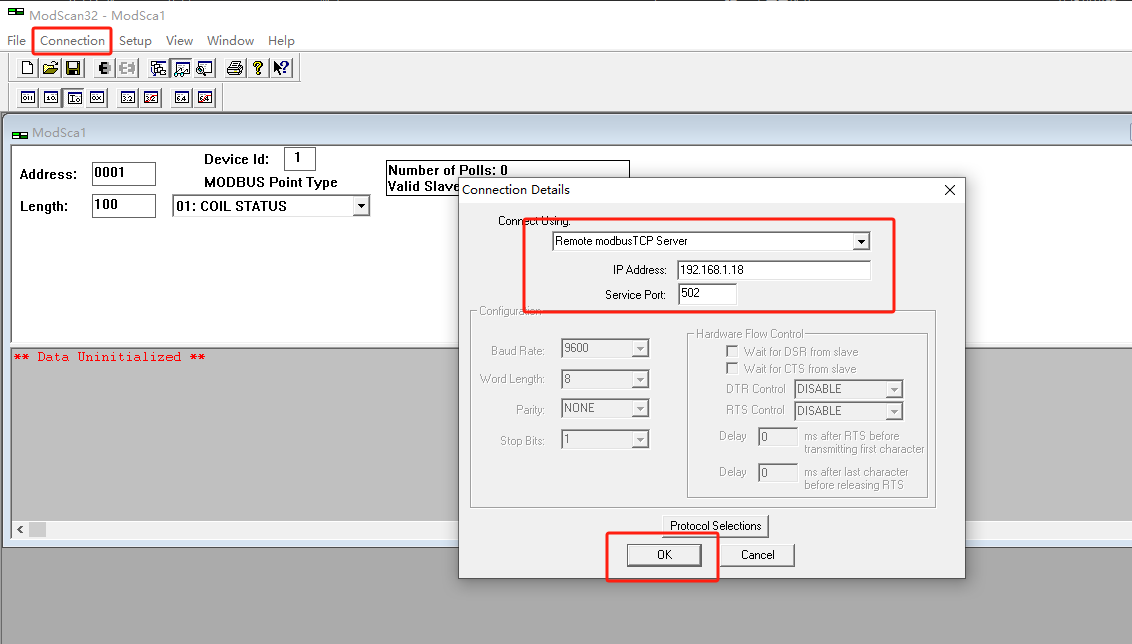
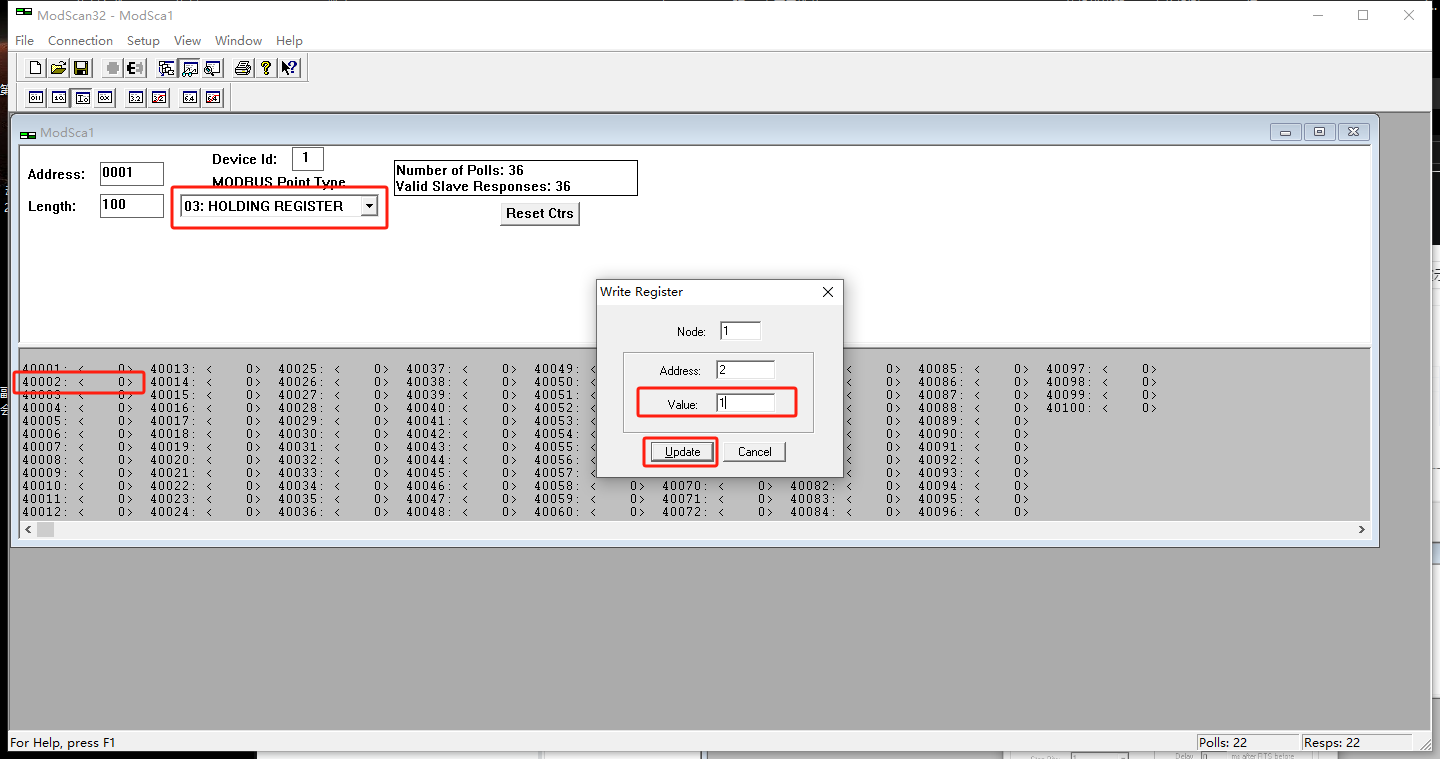
三、使用 modscan32 触发图形化编程
四、使用 modbus-poll 触发在线编程程序
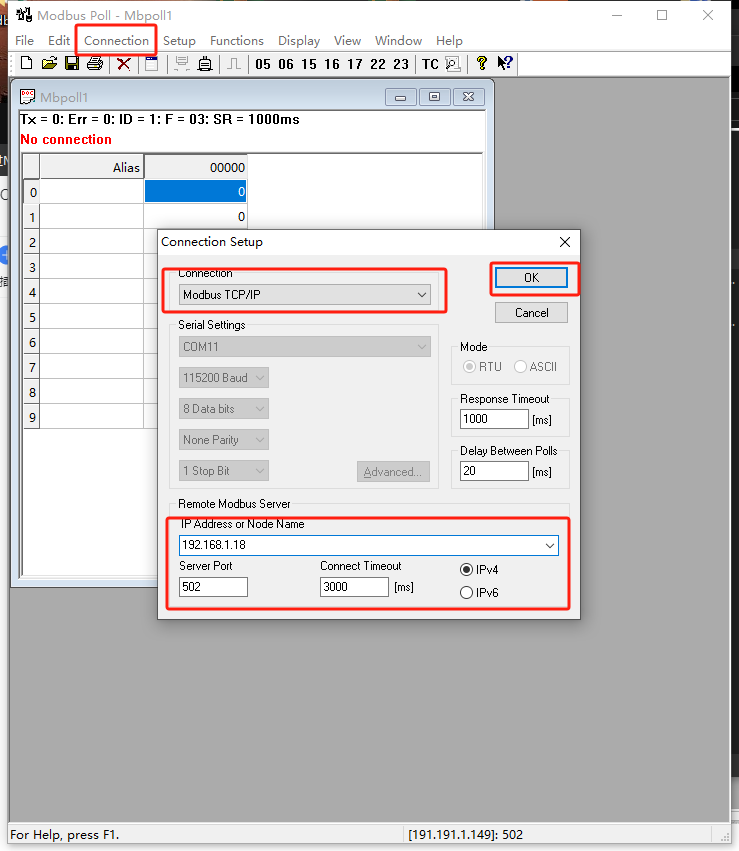

空寄存器

五、下发点位直接控制:

示例:
需进行负数取补,并拆分高低字节
(3)Move-J保持寄存器地址与目标关节角度信息示例

说明:寄存器地址150-161存储了关节1到关节6的目标角度信息,相邻两个寄存器地址存储一个关节角度,浮点类型,高位在前。浮点类型角度信息转寄存器数值方法:
void fun(float value, quint16 *H, quint16 *L)
{
quint8 buf[4] = {0};
memcpy(buf, &value, sizeof(float));
*H = ((quint16)buf[3]<<8)|buf[2];
*L = ((quint16)buf[1]<<8)|buf[0];
}
寄存器转浮点角度方法:
float fun(quint16 H,quint16 L)
{
FloatTo4Bytes uValue;
uValue.Byte[3] = (H >> 8) & 0xFF;
uValue.Byte[2] = H & 0x00FF;
uValue.Byte[1] = (L >> 8) & 0xFF;
uValue.Byte[0] = L & 0x00FF;
return uValue.a;
}
Move-J保持寄存器地址与运动控制参数实例
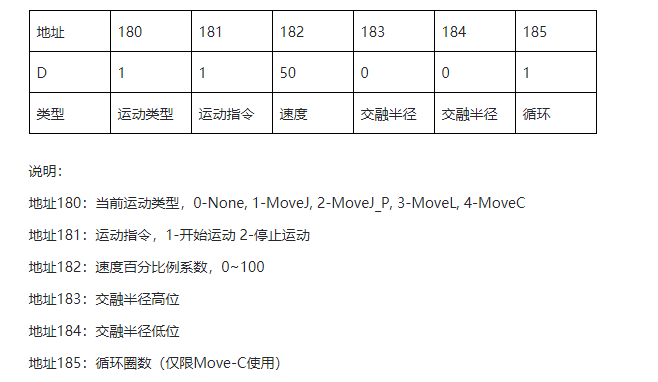
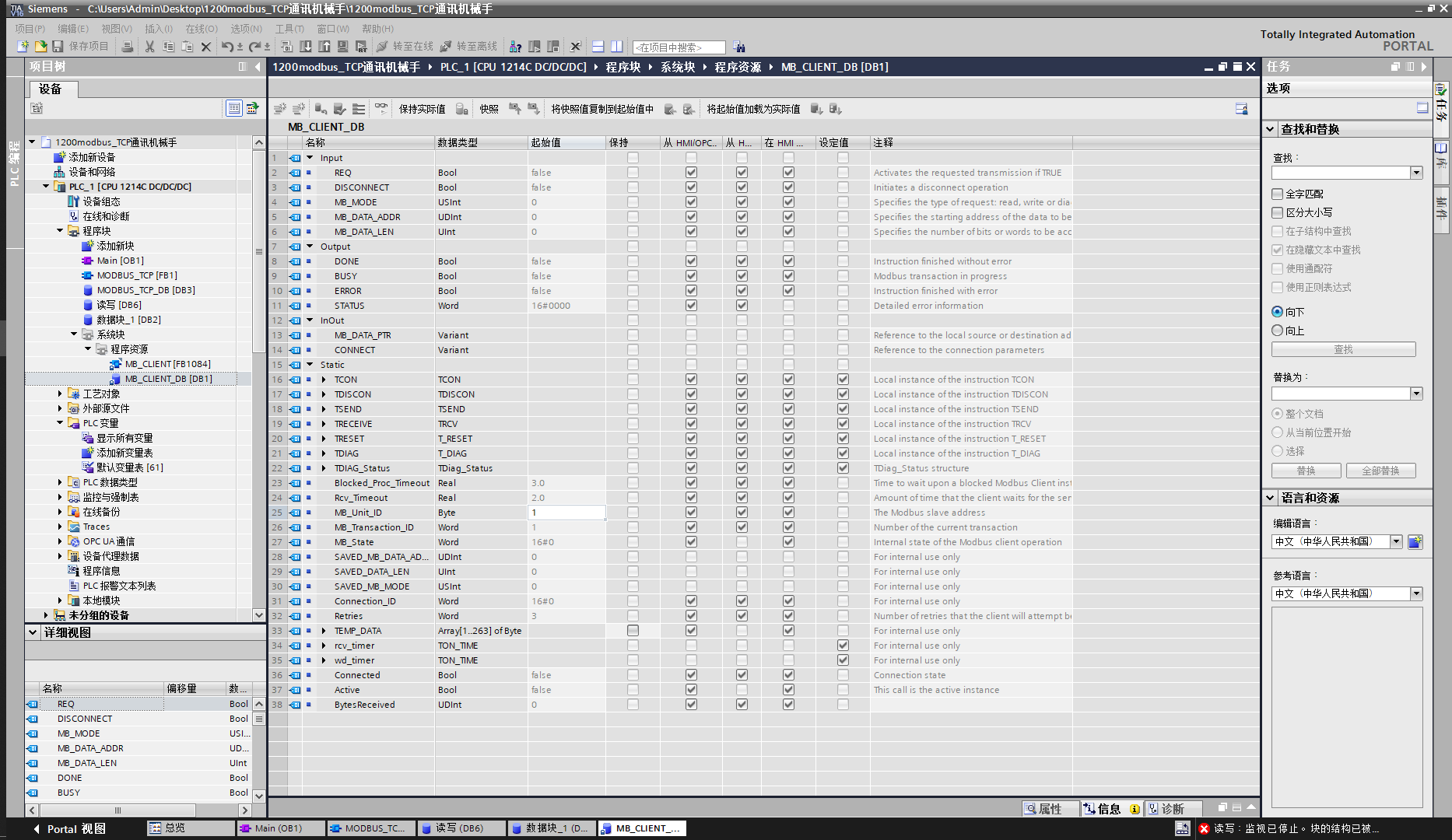
六、使用西门子 1200 PLC 配置详情
本地地址:192.168.1.11
PLC地址:192.168.1.10
机械手地址:192.168.1.20






撰写评论