

【睿尔曼-RealMan】AI理疗机器人教学科研平台——技术方案
Alvin 2024-04-07
一、系统概述
1.1、系统简介
睿尔曼AI理疗机器人教学科研平台是专为美容美体、中医理疗养老等行业开发的理疗按摩机器人,机器人由主体、主控制器、机械臂、传感器集成、按摩工具、操控面板、电气系统等部分组成,
AI理疗机器人教学科研平台是将机器人技术、AI技术等应用到医疗保健行业,适合医疗护理专业的高校和研究院进行中医理疗探索研究,适合机器人类高校、科研机构进行专业实训、课程设计、毕业设计、二次开发等科研教学工作任务。AI理疗机器人教学科研平台具备如下优势:
1)机器人具备能够自主识别穴位、具备模仿人手结构的按摩工具,支持医疗护理专业、中医理疗专业的机构定制开发按摩项目,从而验证中医理论,进行中医理疗创新;
2)机器人支持按摩头二次开发,中医理疗专业、机器人专业的相关高校和研究机构可以将手动的理疗按摩工具,比如:艾灸、砭石、压电式冲击波按摩技、筋膜枪、悬磁诊疗仪等等各类传统的、新式的手动按摩设备,进行二次开发,集成到AI理疗机器人教学科研平台上,从而快速开发不同理疗功能的机器人;
3)机器人支持机器人专业技术研究:AI理疗机器人教学科研平台开放机械臂控制接口、支持3D视觉SDK调用、以及ROS开源功能包适配各类外部器件,支持机器人相关专业的高校和研究结构进行视觉定位、机械臂运动控制,从而完成指定场景应用与特定功能的开发;

(AI理疗机器人教学科研平台、图片仅供参考)
1.2、功能组成
(1)AI理疗机器人教学科研平台具备语音播报功能,包括开机语音播报功能、音乐氛围功能、语音示警功能等功能内容。当机器人开机后,系统都可以进行语音提示,语音提示分为礼貌性介绍语句、品牌宣传语句、系统介绍性语句;当机器人在按摩过程中,可以播放音乐,帮助按摩顾客放松身心;当机器人系统遇到违规操作、设备故障时,系统会进行语音提醒和示警,确保设备和按摩顾客的安全。
(2)账户管理功能:用户可以通过账户管理功能设置自己的账户和密码,便于设备管理;同时支持多个账户的创建、修改、删除等功能,便于一个门店多名员工的操作。每个账号的登录和退出需要记录时间,方便记录每个员工的绩效管理、按摩项目数量/时间的关联统计。
(3)项目开发功能:用户通过项目开发功能可以为为顾客提供个性化服务,以达到最大的放松理疗目的。其中重点项目开发,是为了让按摩店可以根据市场行情、技术、资源等不断的推出新的按摩项目,以达到引流获客的目的。VIP项目开发,是为了为会员客户直接提供定制化的服务,具体流程为:技师/医疗工作人员为会员客户进行预诊诊断后,给出治疗方案,然后制定治疗方案,通过按摩机器人开发VIP项目来实现治疗方案,最终为顾客提供按摩理疗服务。开发的按摩项目系统会自动添加到项目清单中,以供执行。
(4)项目执行功能:用户通过项目执行功能将项目清单中的各类按摩项目,经过简便的操作即可对顾客进行按摩服务。对于执行的按摩项目,可以设定“温度”、“力道”、“速度”、“理疗次数”等,每个子项均以“+、-”的方式开进行调节,从而实现对整个按摩项目的参数整体设置;一个按摩项目,可以直接设置多次。在项目执行过程中,也可以对整个项目的参数进行设置,以及时响应顾客的体验需求。
(5)按摩项目介绍:用户可以通过按摩项目介绍功能,可以及时了解系统自带的按摩项目的功能、按摩头的功效和使用方法、按摩头的各类按摩技法。
(6)安全运行功能:AI理疗机器人教学科研平台自带安全运行功能,包括:开机自检功能、按摩过程中的触碰停止功能、手动急停功能。其中开机自检功能可以实现机器人开机后,系统进行安全自检,包括电气系统、机械臂、视觉、按摩头、控制屏等,确保通信链路畅通、功能完好;触碰停止功能:当机器人正在进行理疗按摩工作时,被触碰、移动后,机器人发出语音示警,机器人同时停止工作,排查后可经过简单操作,就可以完成继续进行按摩项目;手动急停功能:机器人配有线连接手持操控手手柄具备开始、暂停、加档、减档等功能,便于用户直接控制机器人,以免意外发生。
(7)数据存储功能:机器人软件系统自动存储每个账户的登录时间,同时记录每次按摩项目的时间、按摩位置、按摩头、按摩技法、按摩温度+力道、按摩时长等信息,账户与按摩项目进行关联。对系统记录的顾客的信息进行独立存储。
(8)设备管理功能:设备管理功能记录了机器人当前的运行状态和版本编号,以及过往的故障维修详情,便于厂家掌握设备状态;在设备遭遇故障时,厂家进行远程支持时,门店的工作人员可以便捷的告诉运维人员设备的状态;当厂家的工作人员进入现场修复时,可以第一时间了解设备的状态。
1.3、主要技术参数
(1)整机尺寸:≥525mm*430mm*1000mm(不含机械臂)
(2)整机重量:60kg
(3)机械臂臂展:900mm
(4)按摩范围:500*700mm
(5)适用电源:220VAC±10%(50Hz)
(6)环境参数:0-40℃,60%RH以下
(7)整机材质:铝型材拼装结构
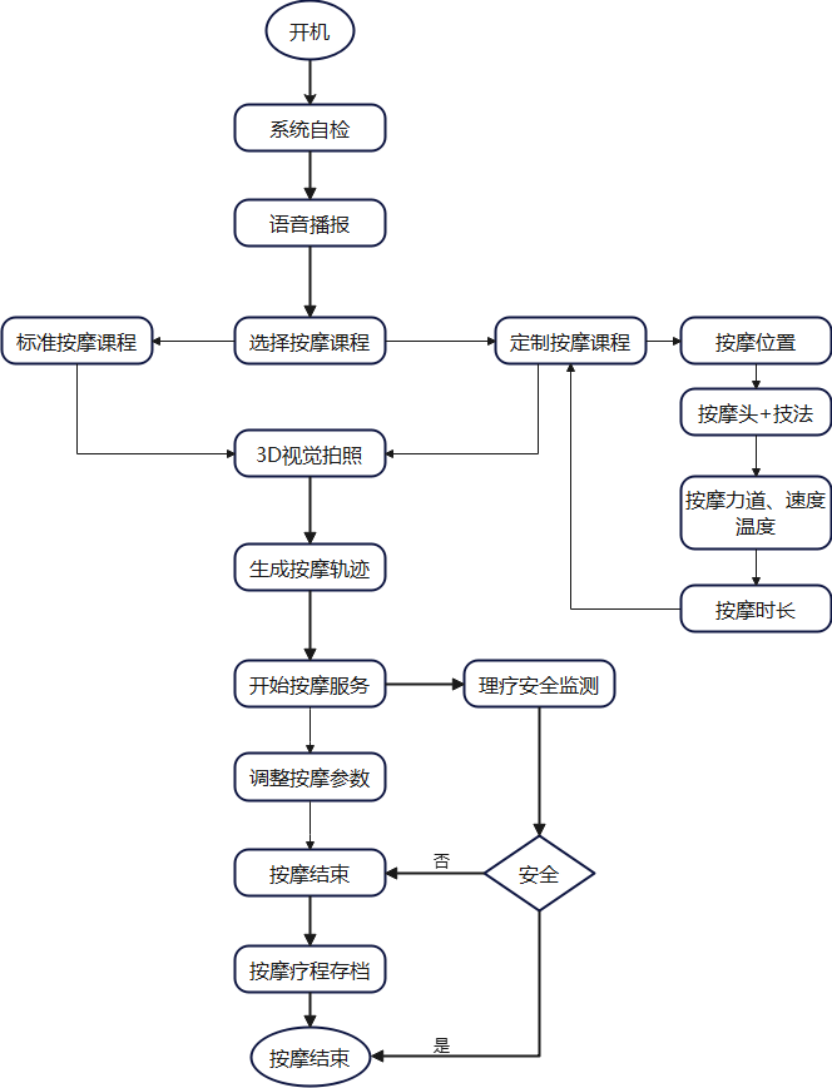
1.4、工作流程
1.5、按摩项目介绍
(1)腰部按摩项目:采用推揉型按摩头对腰部肌肉进行按摩放松,推揉型按摩头独有的4足式设计,正好使用腰部肌肉宽度,通过机械臂的运动控制,可以模拟医师手掌的推、揉等按摩技法,对腰椎部左右两侧的肌肉缓慢揉搓,配合按摩头的热磁效果,可以缓解腰部肌肉紧张和疼痛,改善腰部的血液循环,增强腰部肌肉力量,促进身体的放松和减压。定期进行腰部肌肉按摩,对于维持腰部健康和预防腰部问题都非常有帮助。
(2)膀胱经按摩项目:采用按压型按摩头对后背的膀胱经进行按摩理疗。胱经是人体最长的一条经络,按摩膀胱经可以带来不少好处;按压型按摩头模拟医师掌心、手指关节等特征进行设计,配合机械臂的柔性控制,模仿医师的按、揉等按摩技法,先对脊椎两侧进行肌肉放松,然后沿着膀胱经从上向下做螺旋形按揉推拿,可以促进身体新陈代谢,帮助排出体内毒素,缓解疲劳,改善睡眠质量,体能免疫力。
(3)背部穴位按摩项目:用按压型按摩头的手指部位,模仿技师不同按摩手法,压揉肺俞穴、膈俞穴、肝俞穴、肾俞穴、脾俞穴,起到调节呼吸系统、缓解胃痛和消化不良、以增强肾脏功能、改善脾胃消化功能等功效。
(4)腹腔推拿按摩:推揉型按摩头在整个腹腔进行左右推拿按摩,大范围螺旋向下,达到左右推拿的目的,到达小腹后,起到可以帮助改善消化系统的功能,促进肠胃蠕动,缓解消化不良、腹胀等问题。
(5)其他定制按摩项目
1.6、应用案例

(中医保健按摩理疗)

(运动放松性按摩理疗)
1.7、实训内容及课程
(一)、医学应用实训内容:
(1)机器人组成原理:AI理疗机器人教学科研平台系统讲解及机器人系统理论介绍;
(2)AI理疗机器人教学科研平台安全培训:AI理疗机器人教学科研平台安全功能及操作讲解与培训;
(3)穴位识别:视觉识别穴位原理、操作的讲解和培训
(4)按摩技法模拟:按摩工具功能及按摩技法模拟讲解;
(5)理疗按摩项目开发:理疗项目开发操作流程讲解和培训;
(二)、机器人实训内容:
(1)安全规范:RML63-6F协作机械臂安全操作规范;
(2)机械臂使用:机械臂基本运动指令和TCP标定讲解及练习;
(3)机械臂控制:机械臂语言动作指令编程、外部IO控制、外部轴集成协同控制;
(4)机械臂运动学与动力学:深入理解机械臂的结构、运动学和动力学原理,以及如何应用这些知识进行精确控制和运动规划;
(5)视觉识别与目标跟踪:学习使用视觉传感器进行目标检测、识别和跟踪,为机器人赋予智能感知能力,实现更复杂的任务;
(6)机器人操作系统:基于AI理疗机器人教学科研平台平台学习机器人操作系统ROS(Robot Operating System)与ROS2,掌握ROS通信原理,机器人功能开发原理,并利用ROS进行机器人虚拟仿真实验与真实控制;
(7)机器人二次开发:通过机器人各部分API接口、开放外部接口与ROS开源功能包适配各类外部器件,完成指定场景应用与特定功能实现;
(三)、实训课程:可下方下载文件,查看详情
二、主要配置介绍
2.1、机器人主体
机器人主体采用非动力可移动底盘,以钣金支架和塑料外壳为主体材料,内部用于部署电气模组和走线。机器人主体内部增加配重,以避免机器人在服务过程中倾覆;
移动底盘通过支架的方式支撑和固定操控面板,支架可升降、旋转、翻折,支持技师进行多机位操作。
一、可移动底盘
移动转运设计,为在室内平面上移动方便,以及进行短距离转运,跨越台阶等障碍,设计隐藏式把手,在需要搬运机器人时,只需要拉出2个把手,即可将机器人实现机器人搬运。
机器人设有物料仓,物料仓可以存放3个按摩头。物料仓采用可拆卸外挂的形式,可以借用拉出的2个把手来进行固定,物料仓挂在机器人腰部的正面的位置。

(图片仅供参考)
主要技术参数:
(1)尺寸(长*宽*高):≥525mm*430mm*1000mm
(2)重量:50kg
(3)材质:钣金+塑料外壳
(4)按键:电源键、急停键
(5)灯带:蓝色
(6)移动轮:非动力轮
二、主控制器
主控模块是整个系统的控制中枢,主控制器选择 Nvidia Jetson XAVIER NX模组,该模组预装Ubuntu18.04 系统,配备6核Carmel架构@V8.2 64bit CPU,384核Volta架构的GPU及48个TensorCore,能带来21TOPS的INT8运算能力,尺寸只有90mm*103mm*35mm ,十分适用于移动平台的视觉处理任务。

(图片仅供参考)
三、控制面板
用户可通过操作屏对按摩区域和功效进行选择和参数设定,包括肩颈放松、腰部舒缓、腹腔推揉、腰背推揉等多种按摩项目,屏幕部署在机器人的支架上,可以升降、旋转、翻折,便于技师进行多机位操作,同时控制面板可以取下,与机器人进行无线通信,支持顾客直接操作。

(图片仅供参考)
主要技术参数:
(1)屏幕:12.3英寸
(2)分辨率:1920*1280
(3)操作系统:Windows 10
(4)运行内存:8GB LPDDR3
(5)存储容量: 512G固态硬盘
(6)尺寸:292*208.8*9.76mm
(7)重量:约1.16kg
(8)颜色:银灰色
四、电气系统
电气系统包括稳压电源、功能按钮、状态指示灯等。稳压电源为机械臂、主控制器、各种传感器、按摩工具等设备模块提供工作电源;
电气系统具备电源开关和急停开关各1个,布置于移动底盘上,便于开机和危险急停;
机器人配备手持操作终端,与机器人背面底部有线连接,在执行按摩项目时,顾客手持操作终端,方便调节高低档位(力道控制)和控制开始/暂停,以确保舒适和安全。
机器人具备WIFI功能,通过WIFI功能,操作面板可以机器人主控单元联系,从而进行交互控制;机器人通过WIFI功能,可以连接客户的局域网,从而为后续的对接客户管理平台的数据对接进行功能预留。
机器人配备对外接口,包括千兆网口1个,USB3.0接口4个,HDMI接口1个,DP接口1个,音频接口1个,接口布置在机器人外壳上,外覆装饰罩,便于打开,方便接口使用。

(图片仅供参考)
2.2、功能模块
AI理疗机器人教学科研平台的功能模块由机械臂、视觉模组、推揉型按摩工具、按压型按摩工具等组成。
一、睿尔曼RML63机械臂
机械臂作为按摩项目的执行主体,根据按摩工作范围和力道的要求,选择为睿尔曼RML63-6F机械臂,末端集成六维力传感器。
协作机械臂集成视觉模组和按摩头,控制线均为机械臂内走线;视觉模组采用USB Type-c接口连接;按摩工具安装在机械臂末端,通过标准的电气接口PH2.0的CAN端子连接。

(图片仅供参考)
主要技术参数:
(1)自由度:6
(2)负载:3kg
(3)自重:约10kg
(4)工作半径:900mm
(5)重复定位精度:±0.05mm
(6)供电电压:DC20-30V,DC24V
(7)功耗:最大功耗≤200W,综合功耗≤100W
(8)防护等级:IP54(机械臂本体)
(9)材质:铝合金+ABS
(10)控制器:集成
(11)通讯方式:WIFI/网口/USB串口/RS485
(12)示教控制:拖拽示教/示教器/API/JSO
(13)关节角度:J1 ±180°、J2 ±180°、J3 +165°~-150°、J4 ±180°、J5 ±180°、J6 ±360°
(14)关节最大速度:J1-J2 180°/s 、J3-J6 225°/s
(15)电气接口:开关、电源接口、复用IO接口、百兆WIFI、USB接口1、USB接口2、千兆有线网口、交互RGB指示灯
二、视觉模组
视觉传感器采用Intel realsense D435型3D结构光相机,具备高精度、低功耗优势,可实时采集物体三维信息,适用于25-150cm距离的识别。用来识别按摩人员的体型特征。视觉采用一体化设计。

(图片仅供参考)
主要技术参数:
(1)深度距离:0.25-1.5m
(2)功耗:平均功耗<2.5W,待机功耗<1.5W峰值功耗<5W,峰值电流小于1000mA
(3)深度图分辨率:USB2.0模式:1280x800@7fps640x400@30fps;USB3.0模式:1280x800@30fps;640x400@60fps
(4)精度:1m:±5mm
(5)深度视场角FOV:H67.9° V45.3°
(6)彩色视场角FOV:H71.5° V56.7° D84°
三、推揉型按摩工具
推揉型按摩头主要模仿多个手指关节的特征,作用于腹腔、前胸、腰背部、肌肉、脂肪等部位,进行单方向的推法、来回直线的擦法、圆形的揉法。具有加速血液循环、疏通经络、理筋整复、活血散瘀、缓解痉挛、消积导滞、调节肠胃蠕动、改善局部组织的新陈代谢等作用。
按摩工具的按摩触点与按摩工具基座之间具备弹性,模仿手腕的柔性功能,以便于在进行按摩时,按摩工具可以灵活贴合皮肤,保持压力的持续稳定的输出。
按摩头设计采用多点触头,设置4个按摩头,增加按摩工具与身体的接触点面积,适合不规则的身体表面和较瘦身体,同时又不会因为按摩头数量过于密集,形成按摩平面,降低灵活性。
推揉型按摩头安装于机械臂末端,具备快插快换、即插即用的特点,应用方便。按摩头的电控接口采用PH2.0的CAN端子在底部对连。
推揉型按摩头具备热敏温控功能,从而在按摩的过程中达到热疗的效果。按摩头的触点采用304不锈钢材质,强化热疗效果。
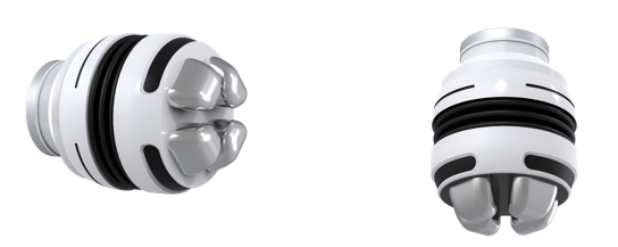
(图片仅供参考)
主要技术参数:
(1)尺寸:Φ90*120mm
(2)重量:0.9kg
(3)按摩头尺寸:2cm
(4)按摩头材料:铝合金+ABS
(5)按摩头数量:4
(6)温度控制功能:操控面板可以直接设定按摩工具温度,温度范围为35℃~48℃
(7)温度检测功能:按摩工具降自身温度上报
(8)快换设计:在机械臂末端安装按摩头快换基座,按摩头做按键式插拔的快换设计
四、按压型按摩工具
按压型按摩头具备人手的拇指、手掌等结构特征,通过机械臂末端的旋转来更换不同的部位,作用于人体穴位、经络、脂肪、肌肉等组织,复现按、压、刮、碾、推等按摩手法,达到排毒养颜、增强抵抗力、缓解肌肉疲劳的作用。
按压型按摩头安装于机械臂末端,具备快插快换、即插即用的特点,应用方便。
按压型按摩头具备热敏温控功能,从而在按摩的过程中达到热疗的效果。按摩头采用铝合金内形和硅胶外形,模仿人手的软硬程度,提高按摩的舒适度。按摩头的电控接口采用PH2.0的CAN端子在底部对连。
在工作时,按压型按摩头可以模仿拇指、手指关节、掌根等部位,配合机械臂的运动控制和力学控制可以,由轻到重地逐渐用力按压在穴位或经络上,停留一段时间(5-30s),再由重到轻地缓缓放松;具有疏筋活络、放松肌肉、消除疲劳、活血止痛、整形复位、消散瘀结等作用。
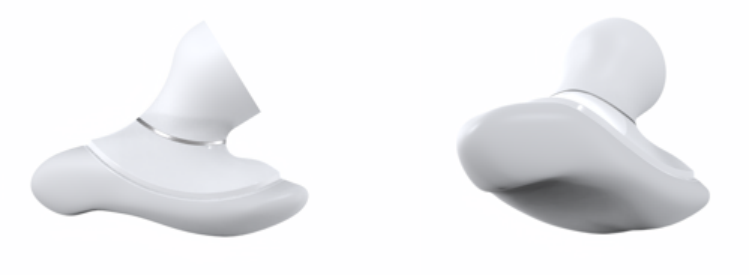
(图片仅供参考)
主要技术参数:
(1)尺寸:115*80*50mm
(2)重量:0.9kg
(3)按摩头尺寸:仿人拇指、手指关节、手掌根等特征
(4)按摩头材料:铝合金+ABS+硅胶
(5)温度控制功能:操控面板可以直接设定按摩工具温度,温度范围为35℃~48℃
(6)温度检测功能:按摩工具降自身温度上报
(7)快换设计:在机械臂末端安装按摩头快换基座,按摩头做按键式插拔的快换设计
三、配置清单一览表
| 序号 | 产品名称 | 规格型号 | 数量 | 单位 | 品牌 |
|---|---|---|---|---|---|
| 1 | AI理疗机器人教学科研平台 | / | 1 | 套 | 睿尔曼 |
| 2 | 按压型按摩头 | 配套 | 1 | 套 | 睿尔曼 |
| 3 | 按压型硅胶套 | 配套 | 10 | 个 | 睿尔曼 |
| 4 | 推柔性按摩头 | 配套 | 1 | 套 | 睿尔曼 |
| 5 | 置物仓架 | 配套 | 1 | 套 | 睿尔曼 |
| 6 | 按摩凝胶 | 配套 | 1 | 瓶 | 睿尔曼 |
四、方案提供商
4.1、公司简介
睿尔曼是一家专注于超轻量仿人机械臂研发、生产及销售的国家高新技术企业,总部位于北京市石景山首特产业园,工厂建于江苏省常州科教城智能数字产业园内,下属另设有睿尔曼智能科技(深圳)有限公司全资子公司。公司集研发、生产、办公于一体,年综合产能20000 台以上。
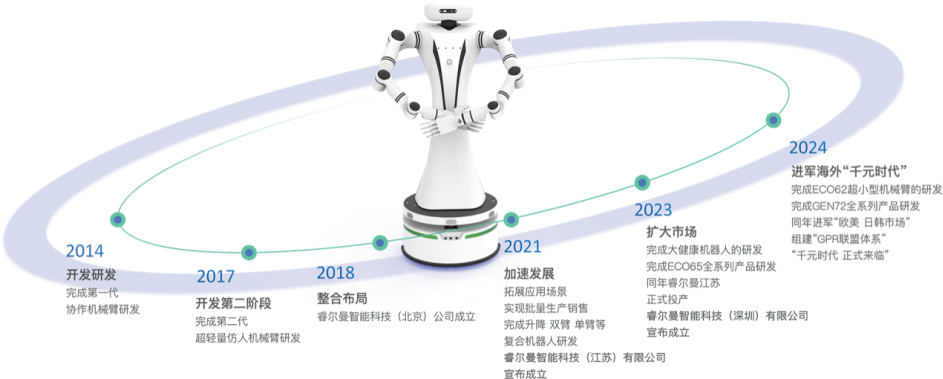
自2010年起,睿尔曼便踏上了超轻量仿人机械臂的创新之旅,作为该领域的引领者,它始终坚守着产品研发与技术创新的初心。其核心团队汇聚了中国早期机器人底层技术研发的精英,他们在这一领域深耕细作,积累了超过十年的深厚底蕴和丰富经验。正是这样的团队,能够从基因层面进行机械臂的原型设计和底层零部件的自主研发,从而在控制器、驱动器、电机、减速器这四大核心零部件上实现了革命性的突破,打造出具有完全自主知识产权的超轻量仿人机械臂。
如今,睿尔曼的产品已广泛应用于新零售、新餐饮、商业服务、智能巡检、医疗健康、检验检疫、教育科研、工业生产、航空航天等多个领域,其智能、通用模块化的机械臂本体,融合了先进的软硬件与人机交互技术,为客户提供了高性价比、高可靠性、易操作的超轻量仿人机械臂及集成解决方案。
睿尔曼不仅拥有多年的机器人产品研发经验,更与北京航空航天大学、北京理工大学、中国农业大学等多所知名高校建立了紧密的战略合作关系,共同搭建了一个全方位、专业互补的创新研发平台。它始终怀揣着一个梦想:致力于让机械臂成为通用的智能化工具,让机器人走入千家万户,为美好生活助一臂之力!
4.2、公司资质
4.2.1、北京市“专精特新”中小企业
4.2.2、高新技术企业

4.2.3、world检测认证


4.2.4、质量管理体系认证
4.2.5、CE认证

4.2.6、可靠性检测认证
4.2.7、已申请专利113项、发明专利57项、实用新型专利25项、授权专利45项、外观专利7项。


4.3、产学合作
睿尔曼智能高度重视产学合作,旨在为各层次、各类型高校提供全套一站式解决方案与建设方案,目前已和清华大学、北京大学、中山大学等高校建立合作关系,以下是部分合作院校和合作案例。

合作单位:北京石油化工学院——人工智能研究院
合作项目:高质量应用型“人工智能”应用技术实验实训基地建设—智能机器人


合作单位:哈尔滨远东理工学院
合作项目:协作机器人实训室建设






撰写评论