

【睿尔曼-RealMan】关节常见问题处理手册
Forrest 2024-03-29
关节常见问题
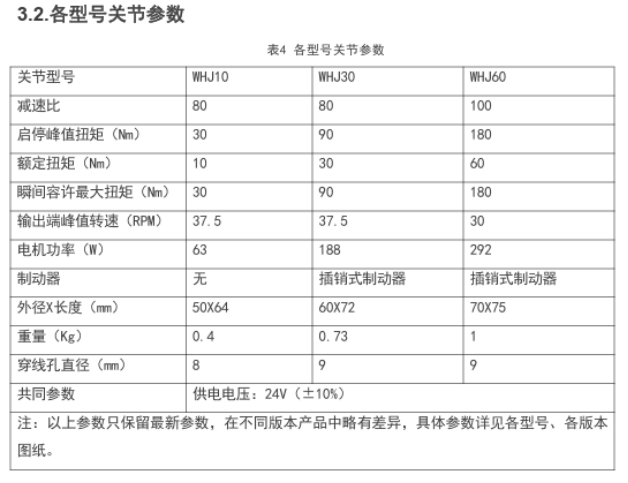
1.关节的基础信息有那些?
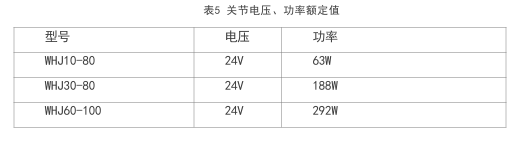
2.关节的供电选择应该选择那些?

3.关节额定功率是多少?
4.CAN-H和CAN-L 分别是什么。
答:蓝色是CAN-H 高电平,白色是CAN-L 低电平。按插的方向右边是高左边是低
can线接口型号:A2001HM-2P 空接母壳 A2001H-P公壳 电源接口型号: XT30 UPB
Can线接口链接:https://detail.1688.com/offer/684040420354.html?spm=a262i4.9165215.zhaohuo-detail-list.24.3bac4e121NxzDy
电源黄色接口链接:https://item.taobao.com/item.htm?abbucket=2&id=607162270928&ns=1&spm=a21n57.1.0.0.3b29523cDQVlEV
5.使用什么模式可以让关节朝一个方向一直走
答:位置模式控制,速度模式控制,电流模式控制均可。
6.位置模式下是不是只能每次运动10°以内。能不能一次运动20°甚至更多。
答:我们和客户均是实时下发位置进行控制的,从安全防护方面考虑,我们增加了相邻周期角度差的限制,相邻周期最多运行10°,防止上位机通讯、规划等异常,导致下发角度突变造成的危险。
7.位置模式控制时关节会出现运动过程中速度降为零的现象从而造成关节在运动时出现卡顿时什么原因。
答:是关节指令下发周期问题,目前关节为了配合机械臂有最佳的运动性能,在关节使用时,驱动内部的伺服周期为4ms,在这个周期发送运动控制指令是有最好的运动效果的。
8.单关节力矩常数是多少
答:目前这个不对客户开放
9.转矩常数和反电势的比值为什么不是定值?
答:转矩常数和反电势都是固定值,所以比值也一定是定值
10.位置模式下,速度环会根据位置指令做微分用于前馈吗?还是只根据位置控制器做出反馈控制?
答:两种都可以
11.在运动过程中关节出现一卡一卡的现象是怎么回事儿?
答:这个问题可以通过关闭速度前馈来解决,但是需要注意的是速度前馈默认是10无法彻底关闭,只能在每次使用时更改速度前馈为0 其次也需要考虑是否是因为客户下发指令周期有问题,如果是20ms下发一次会出现运动过程中速度降为0的现象。
12.拿到关节后怎么知道自己的关节ID是多少?
答:首先我们本司是对周立功的USB CANFD 的CAN卡做了兼容的,如果您有适配的CAN卡可以直接使用本司上位机,如果是CANFD协议下其他的CAN卡,那需要进行1~7的轮询测试,发送报文指令来确定自己的关节ID
13.关节一直报错过压是怎么回事儿
答:先了解客户操作,是否是因为运动过程中是否超过关节限位的问题,如果有,请先发送位置模式控制让关节脱离上次运动指令,在清除错误,查看关节状态,如果不报错,可以在发送位置模式进行上使能操作,若不是超限位的问题,可以询问客户供电设备是否复合我们关节供电要求。
14.一个CAN模块最多可以同时控制多少关节?
答:在我们的机械臂上最多同时控制过8个关节,第八个关节是另外一个can模块转发的。
15.电机的钢度特性曲线。
答:
16.每个关节最快的发送和接受周期是多少?
答:每个关节都需要200us的发送和接受周期,根据客户实际接入的关节来算周期。
17.关节ID 怎么设置才是合理范围?
答:(目前只有少量有开发能力的重点客户开放了广播帧)目前普通帧(4.6.4)的关节ID设置是在1~8都是可以设置的,但是在广播帧(5.0.8)中加入了ID的合法范围检测合法范围1~7,在超过这个范围后关节报错内容为DRV8320错误可以使用上位修改ID到合法范围错误清除。
18.WHJ10,WHJ30,WHJ60这三款的额定转速是多少
答:额定的3000RPM
19.怎么使用CAN指令来更改关节ID
答:在协议文档中的内存控制表中0X01 是驱动器ID 可以通过这个指令来修改ID,示例: 02 01 02) 设置完成后请在发送保存数据到Flash标志,在掉使能的状态下保存。(发送保存Flash后需要等待50ms再下发指令),示例:02 0C 01
20.IAP更新在线标志位是每次使用关节都要操作的吗?
答:对的,这个需要您在使用时发送的指令务必是更新在线标志位。
21.我在位置模式关节伺服指令运动时按照你们上面的示例发怎么不能动
答:我们的只是一个示例只是为您提供一个思路,您需要根据您当前关节角度加10°才是您需要运动的角度,您可以获取关节状态后对照协议文档中的报文含义来算出当前位置
22.数据域的读写情况是高位在前还是低位在前
答:低位在前,例如想发送目标电流值0x00 11 22 33,则实际下发的字 节顺序为0x33 22 11 00
23.连接多个关节时为什么有个别关节无回复也无法识别到该关节
答:首先确实串联的CAN线是否有问题,其次CAN卡上是否增加了120欧电阻,增加终端电阻的主要目的是为了实现阻抗匹配,减少信号反射,以及提高信号传输的质量和稳定性。
24.在同时对7个关节发送指令后为什么有个别关节没有得到回复
答:几个关节同时返回数据会引起总线数据冲突,关节接收发周期最快在200us请控制接收发周期来避免引起总线数据冲突。
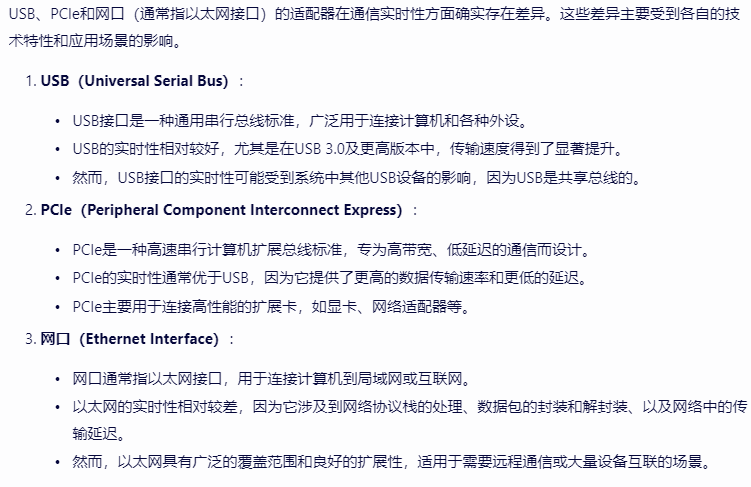
25.usb和pcie,网口的适配器通信实时性上有差别吗?
答:我目前使用的最多的是USB,当您使用我们的产品时后期开发肯定也是使用单片机。 或者使用板载CAN卡。
26.咱们关节可以宽电压输入吗?
答:不行,关节 电源接口最大承受电压为 DC38V,输入电压超过 38V 易导致驱动器故障。当使用开关控制关节供电时,上电瞬间可能存在过压冲击(>38V 的情况),此种供电方式需在开关后、关节电源输入前并联一个电解电容(参考规格:820uF,50V),以抑制上电瞬间输入电压的过冲现象。
使用24V开关电源供电时,需要接我司提供的保护器件,用于保护开关电源和吸收反电动势。使用电池供电时不需要考虑反电动势的影响,因为关节的反电动势直接会对电池进行充电;若电池功率较小,也可以连接我司提供的保护器件,使系统更加可靠。(关节手册中有该内容)
27.关节在速度模式下,转速和数据域中的数据是如何定义的?
答:例:协议文档中的5RPM 报文中数据域是C4 09 00 00 低位在前,在计算机程序员模式16进制下输入09 C4 00 00 转换成10进制也就是2500 这个数值。由此推断出 1RPM =500。同理如果想使用10RPM 转动那就是5000。(电流控制同理现在计算机中算出转换关系依次增加即可)
28.我想精准的移动一定度数要使用那种控制模式?
答:这个可以使用位置模式运动。
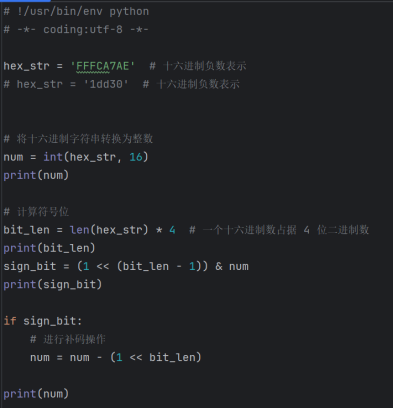
29.读到的关节角度信息,怎么从16进制的CAN指令转换成角度?(正角度、负角 度、负数取补怎么补?
答:在获取报文返回后跟文档提示找到当前位置字节段。在计算机程序员模式下输入该报文字节段低位在前。
例:
当关节角度为负数时需要补码,可以按照一下代码段进行编写转换成角度。
30.电流模式反转怎么写报文?
答:反向运动例如电流为-500ma

用电脑计算器使用程序员模式,算出-500的16进制取后四组参数,在Zcanpro中填写好即可负向转动。(注:在计算器中得到的16进制数据输入进Zcanpro中时输入方式为从后往前)

31.如果我在中间过程中发送第二个转动位置控制指令,这个+-10度的限制是基于我发送指令时的当前位置,还是基于我上一个位置指令的目标位置
答:当前位置
32.一个关节是有几个编码器?编码器是24V供电吗?是个伪多圈吗,掉电后用不用重新寻零?
答:双绝对值编码器 掉电后不用重新寻零。 除了末端多圈编码器外部供电记录零位及圈数,其余绝对值编码器由驱动器供电。
33.广播帧协议模式下目标电流和扭矩的对应关系是什么?比例系数么或者拟合曲线是否可以开放。
答:协议里只是规定了电流的单位,电流和扭矩的对应关系是不变的。不能开放
34.电机的额定电流和最大电流是多少?
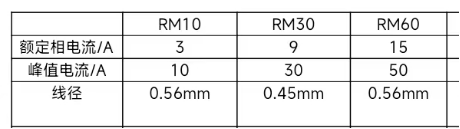
35.这些额定扭矩参数是经过减速比之后的还是没经过减速比的单电机扭矩啊?
答:经过减速比的




撰写评论