

【睿尔曼-RealMan】双臂升降机器人平台使用手册
Brion 2024-03-23
双臂升降复合机器人平台
睿尔曼智能科技(北京)有限公司
安全提示
非常感谢您购买睿尔曼智能科技(北京)有限公司的产品,在打开包装后请首先依据设备配置清单对配件进行检查,若发现配件有损坏或缺少的情况,请尽快与您的经销商或客服联系解决。
产品使用前,请务必仔细阅读产品相关说明。
为了保证您和设备的使用安全,设备连接电源前,请务必确认电源电压是否正确。
使用时请严格按照设备操作说明或在专业老师指导下进行,不得违规违章操作。
本产品含有运动部件,使用时请不要佩戴首饰,长发需盘起,防止缠绕发生危险。
设备在使用过程中出现异常情况,请及时联系专业人员处理。
设备使用完毕后请将设备恢复至初始位置,并断开控制柜电源。
版本声明
本手册内容受版权保护,版权归睿尔曼智能科技(北京)有限公司所有,并保留一切权利。未经许可,不得以纸质、电子的或其它任何方式文档进行复制和传播。
1前言
睿尔曼双臂升降复合机器人平台,旨在为机器人教育提供强大的实训平台,该平台全自主研发,实现机器人建图导航、路径规划,机械臂运动学、动力学、轨迹规划、视觉识别等算法和应用,提供开放式的软件框架,为教学和科研提供平台支撑。
平台集成了移动底盘、深度视觉、语音模块、超轻量仿人机械臂、五指灵巧手、两指夹爪等各种仿人功能设备。同时在移动底盘上安装了超声波、激光雷达、视觉传感器,使该平台变得更加安全、智能。
平台总高1520mm,单臂负载5kg且包含6/7个自由度,整体小巧灵活,可实现自主导航及避障、语音交互控制、视觉识别定位、双臂协同作业、拖动示教复现等一系列功能。控制方面提供多种二次开发形式、支持多种通讯方式、开放度高。致力于使传统机器人变成一个有手、有脚、有耳、有眼、有触觉、有大脑,可示教学习,亦可自主规划,实用性强的高智能化产品。
2产品概述
2.1产品特点
该教育平台主要应用于教育教学,因此需要提供尽可能多的学习资源、方便的使用软件、开放式的二次开发接口,具有以下特点:
(1)集成度高:各部件尽量采用一体化集成设计,方便维护,节省空间;
(2)交互性好:设计方便易懂的人机交互界面,便于学习者能够更快的了解系统;
(3)开放性强:提供多种二次开发形式,发挥教育平台的优势;
(4)功能丰富,功能单元丰富,传感器类型多样,各单元可进行单独控制也可以进行协同控制,使学生逐步熟悉产品功能。
2.2功能描述
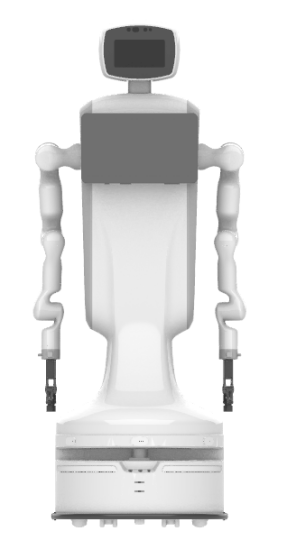
机器人系统示意图和各系统的功能描述如下所示:

图1 机器人系统示意图
(1)结构分系统:
结构分系统包括机器人的躯干、头部等结构,为机器人提供支撑和美化外观等功能。
(2)仿人机械臂:
睿尔曼研制的超轻量仿人机械臂,具有6/7个自由度,具有非常广泛的应用场景。
(3)五指灵巧手;
五指灵巧手集成在机器人手臂末端,用来实现模拟人手抓取物体的功能。
(4)主控制器:
主控制器是整个产品的控制中枢,控制器与视觉相机、底盘等部件通信,同时控制手臂及末端的动作,协调完成用户指定的任务。
(5)视觉相机:
视觉相机是机器人对外采集图像信息的终端,为机器人指定任务提供外界环境的输入。
(6)WHJ30关节:
WHJ30关节的作用是带动头部视觉相机及及显示器在俯仰角度上运动,增大头部视觉的视野范围。
(7)语音模块:
语音模块的作用是通过语音的形式与人完成信息采集和互动。
(8)交互屏幕:
机器人共有2块交互屏幕,头上显示屏为讯息显示功能,胸前屏幕则具有触屏交互功能,采集人机互动的信息。
(9)升降模组:
升降模组为机器人扩大了手臂工作范围,进一步拓展了应用场景。
(10)可移动底盘:
可移动底盘是机器人的重要组成部分,负责机器人的移动,同时为整机提供供电、安装空间等。
2.3系统通讯图
如图为各系统通讯设计。
注:升降模组是机械臂左臂拓展轴,为机器人扩大了手臂工作范围,WHJ30关节是机械臂右臂拓展轴,为机器人增加头部俯仰角度。
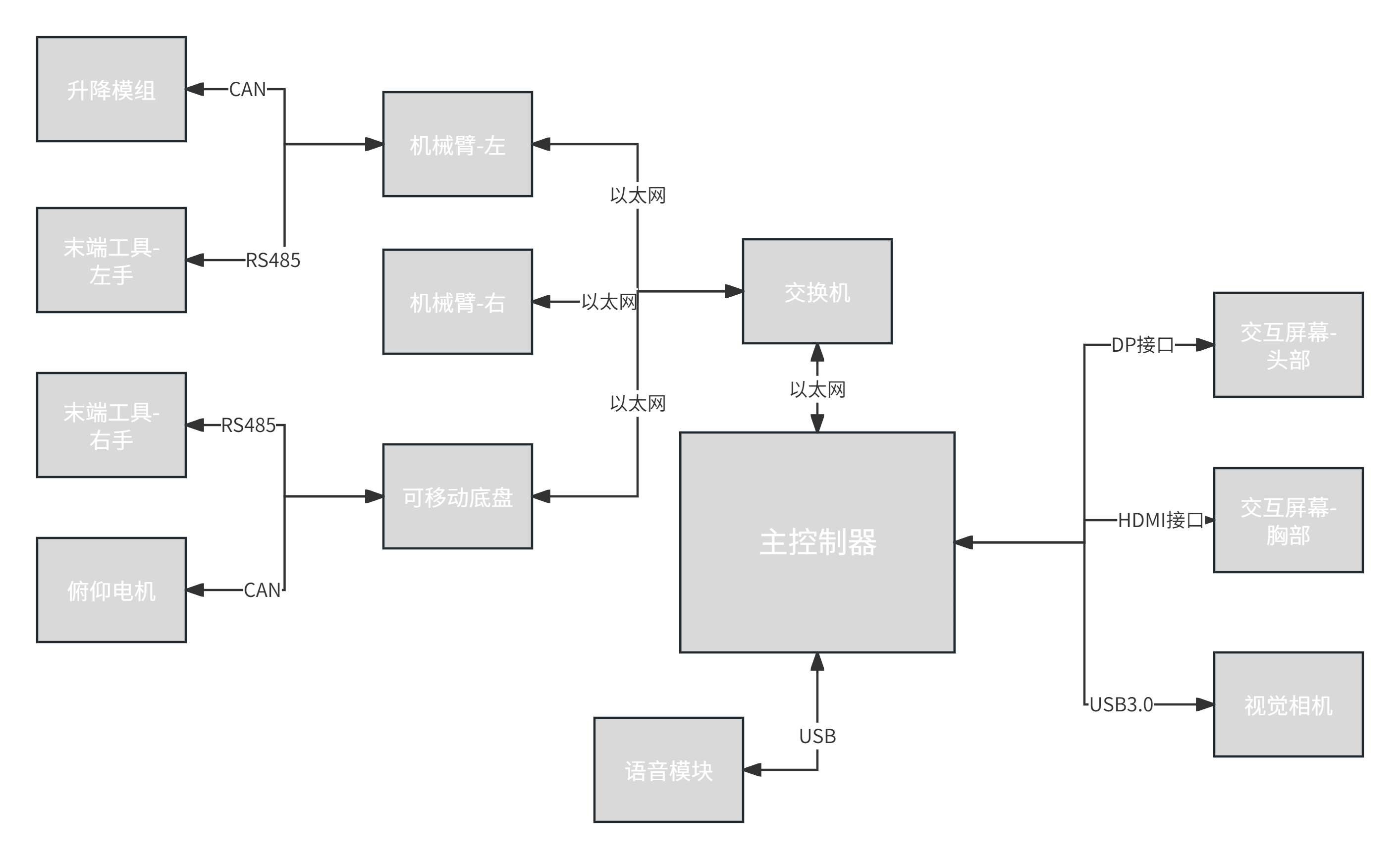
图2 机器人系统示意图
3整机参数
充电电源:单相三线~220V±10% 50Hz
工作电压:DC24V
工作环境:温度-10℃~+40℃ 相对湿度≤85%(25℃) 海拔<4000m
平台尺寸:平台高度1520mm,最大臂展2090mm,包络尺寸为1520*2090*530。
安全保护:具有激光扫描避障、视觉避障、力传感器、紧急停止等功能
对外接口:网口、HDMI、USB口
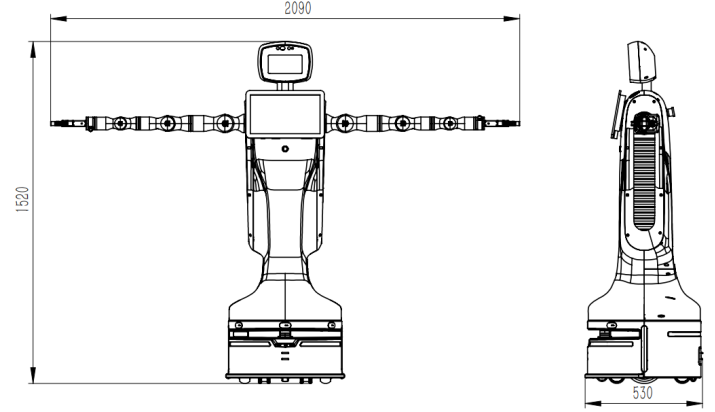
图3 平台尺寸图
4分系统介绍
4.1结构分系统
双臂升降复合机器人结构分系统主要包括躯干、头部等外观结构件,及内部集成及安装所需的结构件、转接件等。
4.2仿人机械臂
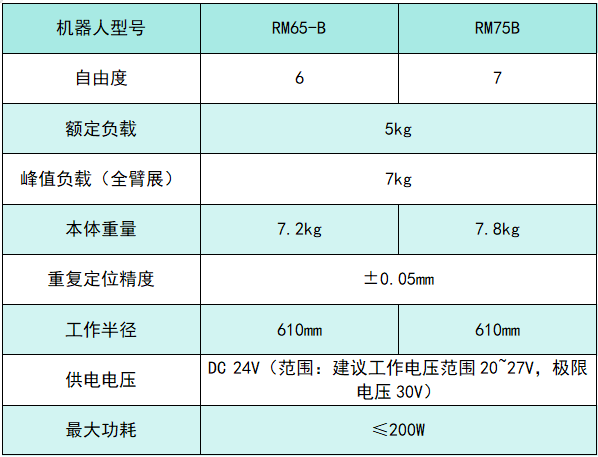
双臂机器人搭载两台RM65B或RM75B机械臂,RM65B/RM75B是睿尔曼研发的超轻量仿人机械臂,具有一体化结构控制器、重量轻、负载大、超高负载自重比,更能适应各种复杂应用场景。
睿尔曼标准6/7轴RM65B/RM75B机械臂的具体参数见下表。

图4 机械臂
RM65/RM75-技术规格

4.3五指灵巧手
基于系统设计的精巧与美观原则,我们力求避免线缆的繁杂与设备的冗余,特别选取了五指灵巧手作为执行器,并将其直接集成在机械臂的末端。这样的设计不仅优化了整体结构,还提升了操作的便捷性。
末端执行器是一款利用小体积大扭矩微型伺服电缸而设计生产的机械灵巧手,以下简称为“灵巧手”。
该灵巧手集成了6个微型伺服电缸,用户接口采用 RS485通信接口,内置灵敏的压力传感器,通过设置不同的阈值方便用户进行不同硬度物体的抓取,简洁高效的接口控制指令可使用户快速实现对灵巧手的操控,优质的性能使该灵巧手应用于服务机器人、教学教具、假肢等领域。
仿人五指灵巧手具备6个自由度和12个运动关节,重量540g,建议供电电压24V,最大电流5A

图5 末端执行器
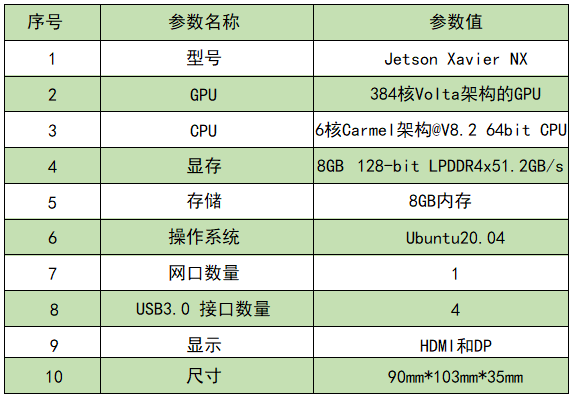
4.4主控制器
主控模块是整个系统的控制中枢,主要负责以下功能:
(1)接收用户指令,上传系统状态;
(2)可通过 USB3.0 接收视觉传感器,对目标物体进行识别和定位;
(3)可通过网口与机械臂通信,发送机械臂控制指令,获取机械臂状态信息;
(4)可通过网口与移动底盘通信,发送底盘控制指令,获取底盘状态信息等;
(5)负责两块屏幕的显示及接收信息。
该模块选用该模块选择 Nvidia Jetson XAVIER NX 模组,该模组预装 Ubuntu20.04 系统,配备6核Carmel架构@V8.2 64bit CPU,384核Volta架构的GPU及48个TensorCore,能带来21TOPS的INT8运算能力,尺寸只有90mm*103mm*35mm,十分适用于移动平台的视觉处理任务。

图6主控模块
视觉处理模块参数如下表所示:
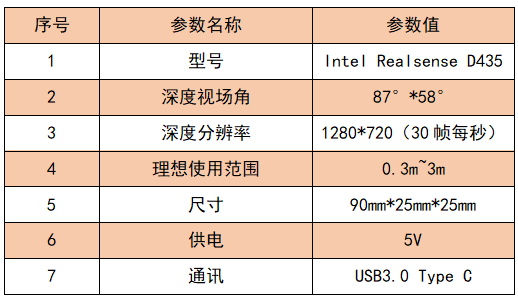
- 4.5视觉相机
视觉感知传感器安装在头部。实现对视野范围内物体的识别和定位,从而为移动和抓取提供输入。其参数如下:

图7 RealSense相机示意图
4.6WHJ30关节
为了拓展头部相机的视角,为头部增加一个俯仰的自由度,执行机构由电机完成,相关参数如下:
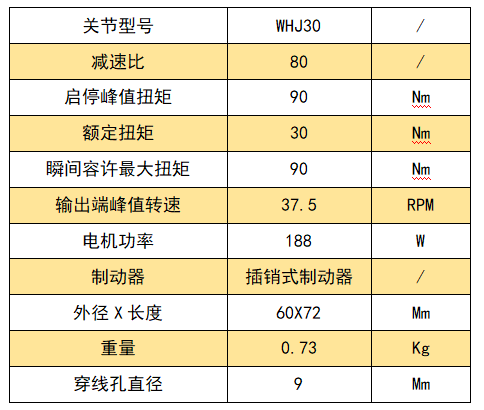
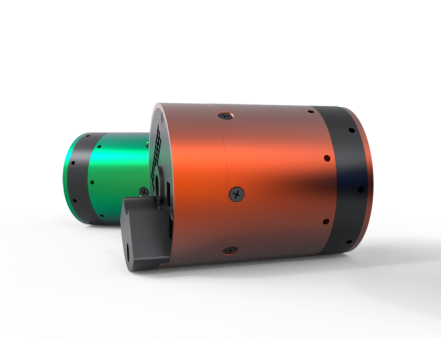
图8 电机示意图
4.7语音模块
语音模块安装于机器人躯干内部,可对外部音频采集,内部喇叭信号采集;内置语音唤醒、降噪算法及离线命令,可用于拾取用户语音指令,播放应答信息,可通过USB接口与主控模块实现通讯。
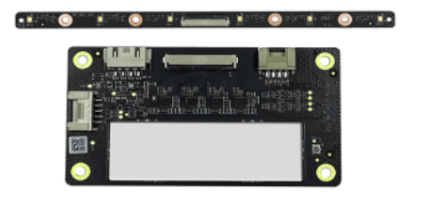
图9 AIUI语音模块
4.8交互屏幕
交互屏幕由机器人头部的显示屏和胸前的触控屏组成。头部的显示屏为7寸,胸前的触控屏尺寸为14寸,其具体参数如下:


图10 屏幕示意图
4.9升降模组
升降模组的作用是扩展机器人手臂的可达范围,按要求可实现约400mm。本机器人采用睿尔曼研发的升降模组,其参数如下。

4.10可移动底盘
移动底盘为机器人的主要运动和承载部分,负责对室内环境进行建图,同时路径规划后到达用户指定位置进行作业。另外,具备自动充电功能,当系统电量不足时,可自主移动到充电桩处充电。
移动底盘配套充电桩,外形及参数如下所示:

图11 移动底盘

5产品配置
本套双臂升降复合机器人的主要配置如下表所示。

6使用说明
本套双臂升降复合机器人的使用说明请参照以下进行。
6.1通讯连接
机器人平台整体通过以太网进行连接,并留有对外接口,各个模块IP地址设置如下:
移动平台:IP 192.168.10.10:9001
主控模块:IP 192.168.10.11 账号:RM 密码:rm
机械臂(左臂):IP 192.168.10.18 端口号 8080
机械臂(右臂):IP 192.168.10.19 端口号 8080
6.2设备开关机
步骤一:安装机械臂末端工具。
机器人发货时,灵巧手已经取下,进行单独包装,使用前,需安装好所有配件。注意按安装方向,如图所示。

图12 末端灵巧手安装角度
步骤二:打开机器人总开关。
机器人总电源开关位于移动底盘上,(位置:移动小车中间中空位置上侧),长按听到移动底盘发出连续响声后松开,开关位置如下图所示:

图13 机器人总电源
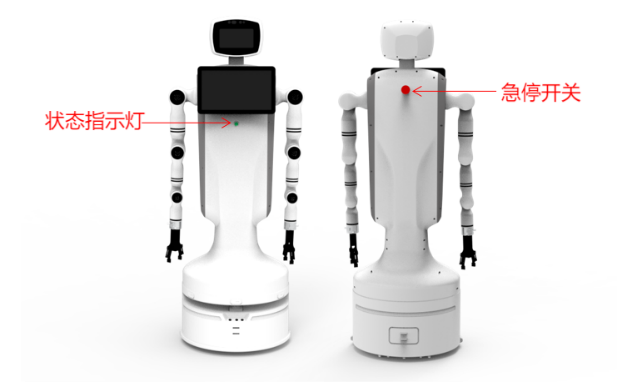
步骤三:分系统上电。
检查急停开关是否在正常状态,如果处于按下状态,顺时针旋转按钮,使按钮弹起,机器人正常开机,胸前状态指示灯变为绿色。
步骤四:设备关机。
关闭设备时,长按总电源开机按钮,待听到连续声响后松手即可!
步骤五:设备充电。
将充电桩移动底盘后侧,有两个充电触点,当触点接触到充电桩前黑色触接通电源后,在点后,移动底盘指示灯会闪烁,充电桩亮红灯,代表充电成功。
充电桩如下图:

图14 机器人充电桩
6.3设备调试
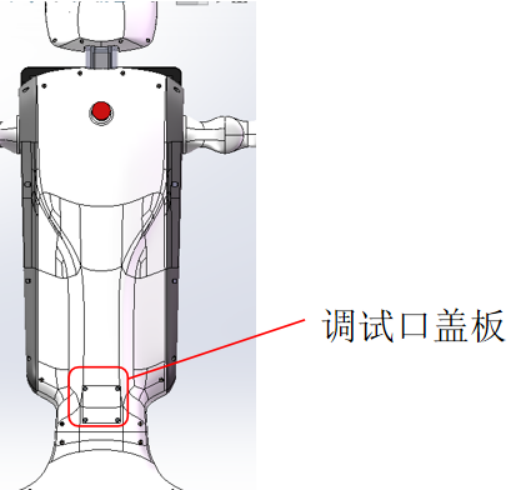
步骤一:打开对外调试接口。
机器人背部下方有调试接口,连接前需要将调试盖板打开取下,如图所示。
步骤二:连接对外调试接口。
机器人背部下方包含6个对外通讯接口,插口说明如下:
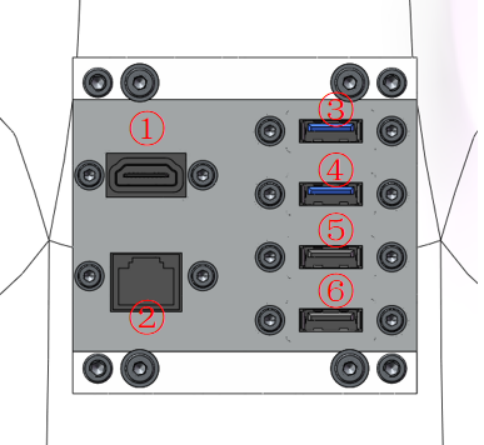
图15 通讯接口
1.HDMI接口,连接显示器
2.以太网口,可连接主控模块,移动底盘,机械臂
3、4、5、6 USB插口连接主控模块
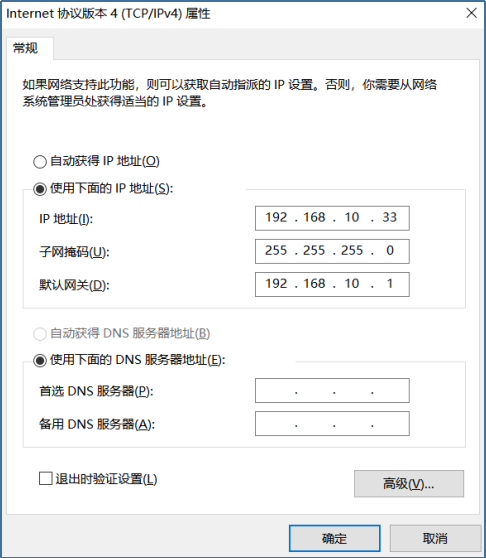
步骤三:参数配置(下面以右侧机械臂连接为例)。
1.本机电脑端口IP改为192.168.10.33 (10网段除10、11、18、19以外的IP即可)。
机械臂示教器web端任意浏览器登陆(推荐使用谷歌浏览器最新版本:https://www.google.cn/chrome/next-steps.html?statcb=1&installdataindex=empty&defaultbrowser=0),通过此人机交互界面,可以操作机器人本体和控制器,执行和创建机器人程序、读取机器人信息。
可根据使用场景,选择不同的示教器载体,示教器支持全平台使用,如安卓平板、Windows系统的平板或电脑、苹果系统的平板或电脑、Linux系统的电脑。示教器载体与机械臂连接可选择有线或无线两种方式(连接方法见8.4.1),在电脑端使用示教器:
无线连接默认WIFI名称格式如下图所示,密码默认为12345678。

图16
(1)打开浏览器,若使用有线连接,则网址输入192.168.10.18进入登录页;若使用无线的AP模式连接,则网址输入192.168.33.80。如下所示

有线连接

无线连接
图17 输入网址

图18 示教器登录页
(2)输入账号:user,密码:123,点击登录即可进入机器人控制界面。

图19 用户名及密码

图20 网页标题及网址
2.单击配置----->系统配置----->通讯配置---->设置左臂/右臂IP和端口---->确定---->连接机械臂
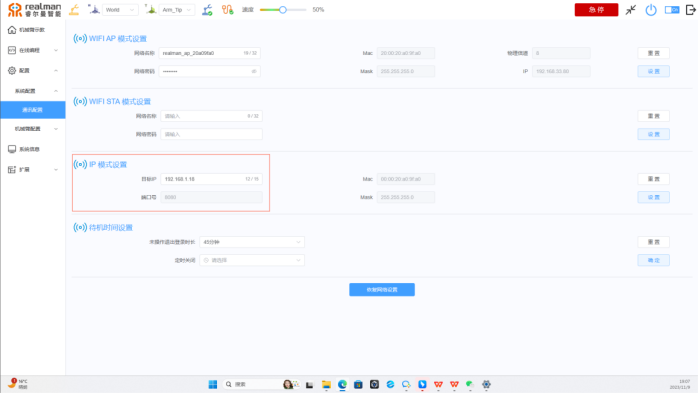
图21 示教器连接IP设置
步骤三:机械臂控制。
1.点击机械臂示教---->选择真实机械臂,此时可通过示教器进行机械臂控制,示教器的使用请参照用户手册。
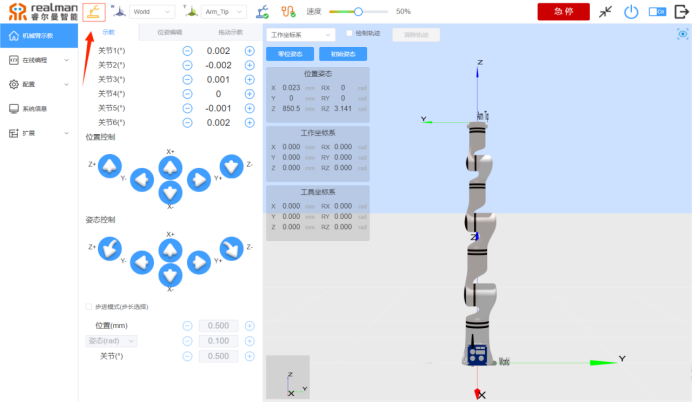
图22 机械臂示教界面
步骤四:升降机控制/拓展关节控制。
1.连接好机械臂左臂后,点击示教器界面的拓展---->选择升降机,点击升降机控制后,当前状态会显示正常或错误代码,然后根据当前需求进行升降控制。注意:开始调试升降机时时建议将速度调低,对设备熟悉后再进行提速,以免造成意外。
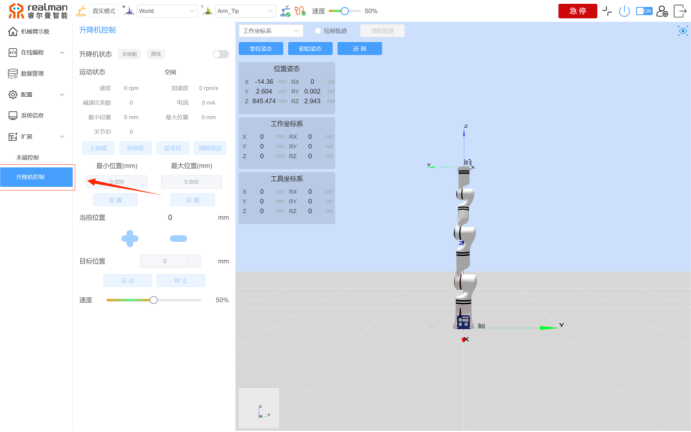
图23升降关节控制
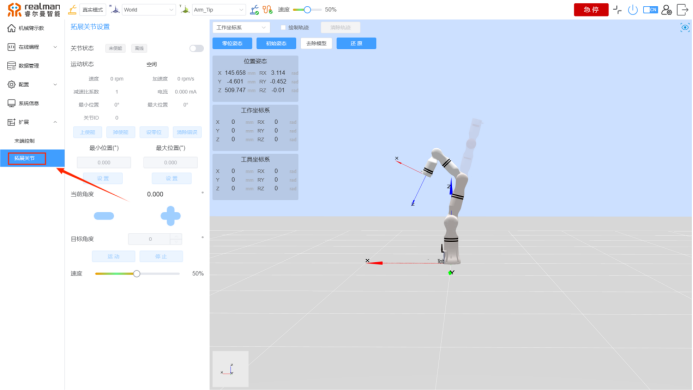
2.连接好机械臂右臂后,点击示教器界面的拓展---->选择拓展关节,点击拓展关节后,当前状态会显示正常或错误代码,然后根据当前需求进行拓展关节控制。注意:开始调试拓展关节时建议将速度调低,对设备熟悉后再进行提速,以免造成意外。
步骤五:在线编程。
机械臂和升降机的在线编程功能,请参考《睿尔曼机器人WEB示教器用户手册-1.6》。
步骤六:其他分系统调试。
其他分系统的开发和调试,可参考随箱U盘中相应的技术资料进行开发。
6.4安全使用注意事项
6.4.1容易产生意外或伤害的操作:
①行为描述:进行机械臂控制(在线编程或拖拽示教) 操作时、或进行升降机控制时,应考虑机器人本体或其他物体的三维空间避让,否则可能会对机器人本体外壳或显示屏等造成磕碰、划伤。
应对措施:操作前应对动作进行预判,尽量避免危险操作,如无法避免,可以在初始调试时将速度调慢,留好反应时间;同时预判可能有风险发生时,应准备好拍下机器人的急停按钮,避免风险。
②行为描述:使用两指夹爪或五指灵巧手进行夹取物体时,应保证夹取牢靠,同时注意不要超出机械臂和夹爪或五指灵巧手的负载范围。另外由于机械臂5轴、6轴无抱闸,在机械臂断电后(底盘没电或急停拍下时),5轴和6轴会在外力作用下运动,断电后应采取相应措施,以免造成意外。
应对措施:在夹取负载时遵循设备要求,在主动或意外断电时对末端负载进行处理,避免在机械臂5轴和6轴在外力作用下运动发生意外。
7运输、贮存和开箱
以下按照打包和运输的步骤进行描述,开箱即按照相反步骤进行操作
步骤一:
将五指灵巧手取下单独进行包装。
步骤二:
机器人在运输时应用拖拽示教将姿态按下图调整,同时将双臂停放至最下端位置,减少运输过程中对电机的冲击。
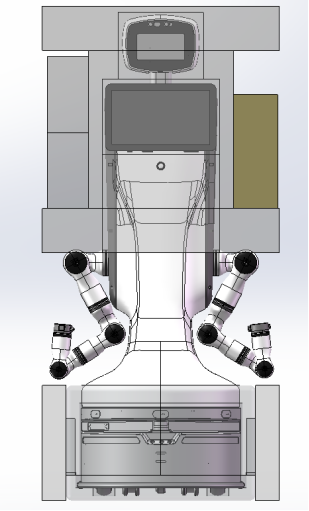
图 24 包装邮寄姿态
步骤三:用包装泡沫和包装膜将机器人包覆完整。同时打木箱对机器人进行保护。注意,对机器人进行人力搬运时,必须搬运底盘钣金外壳,不要搬运机器人双臂或外壳,以免损坏机械人内部结构。
8.更多资料
获取更多开发资料、了解更多场景案例:

微信公众号二维码

抖音号二维码
联系我们:
sales@realman-robot.com
技术支持:
forrest@realman-robot.com
公司地址:
睿尔曼智能科技(北京)有限公司
地址:北京市石景山区杨庄大街69号首特钢园创新工场A2层
睿尔曼智能科技(江苏)有限公司
地址:江苏省常州市常州科教城智能数字产业园7号厂房
睿尔曼智能科技(深圳)有限公司
地址:广东省深圳市宝安区华丰国际机器人产业园一期A栋五楼




撰写评论