

睿尔曼RM65-BI系列机械臂实训指导(一)-机械臂线路连接及开机常见问题详解。
l 2024-03-21
1.实训目的
了解RM65-BI系列机械臂线路连接。
2.实训环境
RM65-BI机械臂一套。
3.实训原理
3.1控制器接口
在机械臂的基座处留有电源输入插口、通讯线接口、输入输出接口。具体接口定义如下:

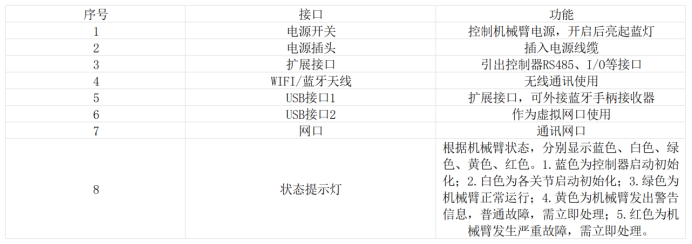
图 1 机器人电气接口说明
4.实训内容
实训内容:将机械臂固定于桌面上,并进行拖动示教及轨迹复现。
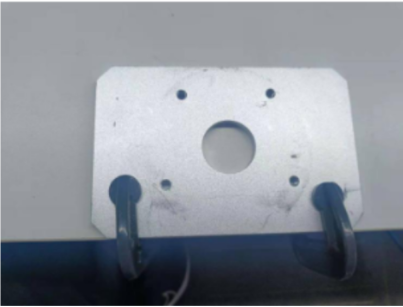
步骤一:取出机械臂安装板,并用固定夹与桌面进行锁紧固定,如下图所示。
步骤二:取出机械臂本体和固定螺栓,将基座处机械臂安装孔与固定板上的螺纹孔对齐,并通过螺栓进行锁紧固定。

步骤三:取出机械臂电源线,将两芯线一端接入供电电源(棕色接24V+,蓝色接24V-);航插的一端插入机械臂基座处电源插头。

步骤四:按下基座处电源开关键,电源键为带灯按钮,按下后按钮蓝色灯亮起。
步骤五:机械臂按下电源键后,会进入初始化过程。状态指示灯会由蓝色变为白色,再到绿色指示灯闪烁,末端绿色和蓝色按钮亮起,表明机械臂初始化成功。

步骤六:长按机械臂末端绿色按钮,机械臂将处于可拖动状态,拖动机械臂末端进行轨迹记录,松开绿色按钮即完成轨迹记录,末端按钮位置如图所示。

步骤七:短按机械臂末端蓝色按钮,机械臂自动回到轨迹起始位置,并进行一次轨迹复现(机械臂只复现最后一次记录的拖动轨迹)。
步骤八:按下电源开关键,机械臂关机即可。
机械臂开机常见问题:
按下电源开关后,机械臂启动不成功:检查机械臂供电电源是否符合要求:机械臂的供电建议采用20-27V的直流电源,极限电压不得超过30V,供电设备最好能提供瞬间最大20A以上的电流,功率达600W及以上,以满足机械臂启动时自整定的电流需要。
我司使用电源网址:
https://detail.tmall.com/item.htm?spm=a1z10.3-b-s.w4011-23472802678.25.3a213f86ri07Gh&id=596551882593&rn=f8a9c269b5f7a4790419fa1a9258f052&abbucket=11&skuId=4359660664596
2.开机后没做任何操作,机械臂蜂鸣器一直滴滴响,怎么操作?
连接示教器,查看系统信息界面,看关节是否有错误信息,针对不同的错误,采用相应方法进行清除即可。
3.系统信息界面提示超限位,解决办法:
步骤一:在机械臂示教器界面查看当前关节角度。
步骤二:若关节角度超出了软限位,但未能超出硬限位,则可长按绿色按钮->机械臂自动回到限位内;也可长按蓝色按钮->机械臂自动回到零位姿态。




撰写评论