

【睿尔曼-RealMan】RealMan机械臂全系列通用资料-版本对应关系
Forrest 2024-03-21
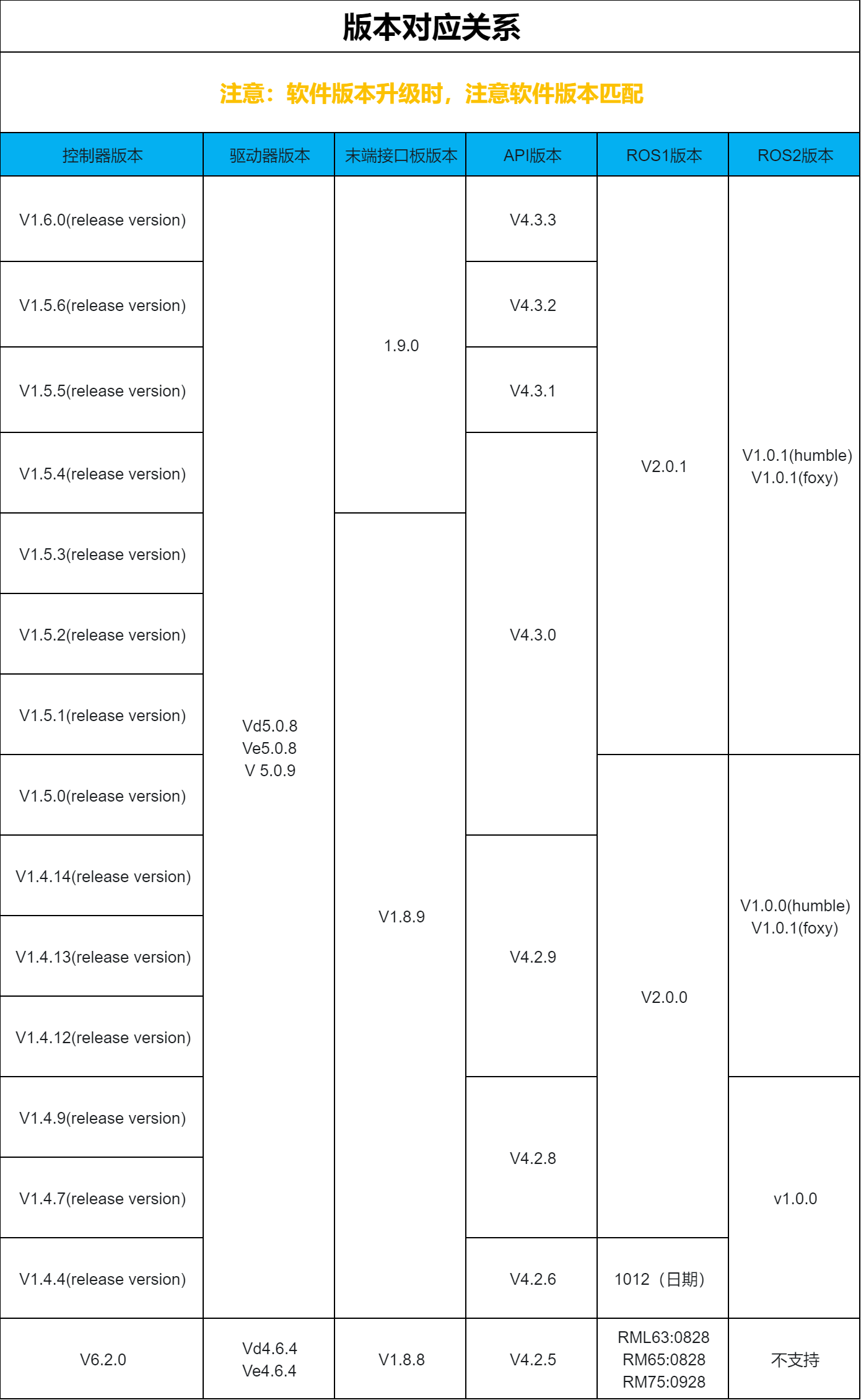
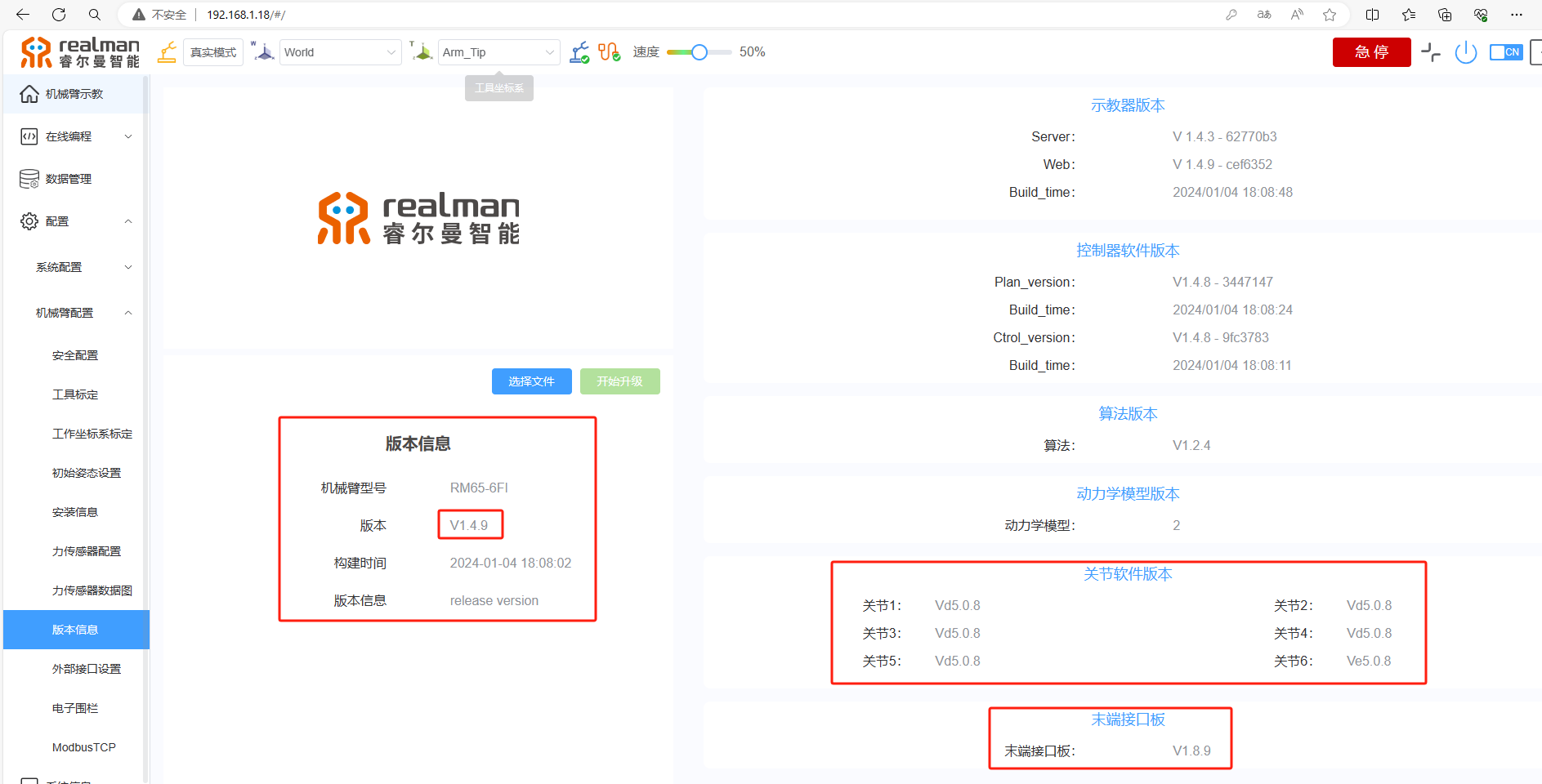
一、控制器、驱动器、末端接口板版本查看方法。
1. 登录WEB示教器,在配置》机械臂配置》版本信息界面可以查看。
2. 登录方法可以参考:睿尔曼机器人快速使用手册V1.5 - 睿尔曼智能论坛 (realman-robotics.cn)
3. 如需升级控制器、驱动器、末端板软件版本,可以在技术交流群中联系我司技术支持获取升级包。
二、ROS1 版本信息
通过压缩包名称来判断版本

最新版 ROS1 功能包下载链接:
https://github.com/RealManRobot/rm_robot
ROS1 手册目录

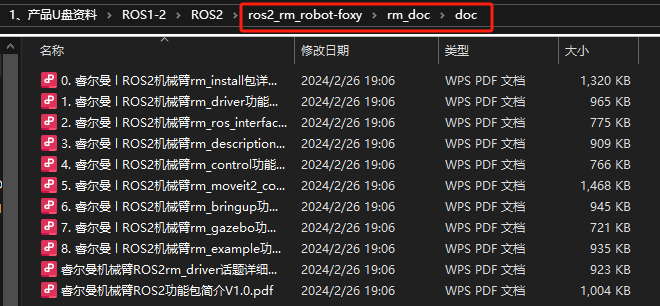
三、ROS2 版本信息
机械臂ROS2_Foxy软件包
代码链接:https://github.com/RealManRobot/ros2_rm_robot/tree/foxy。
机械臂ROS2_humble 软件包
代码链接:https://github.com/RealManRobot/ros2_rm_robot.git
ROS2 手册目录
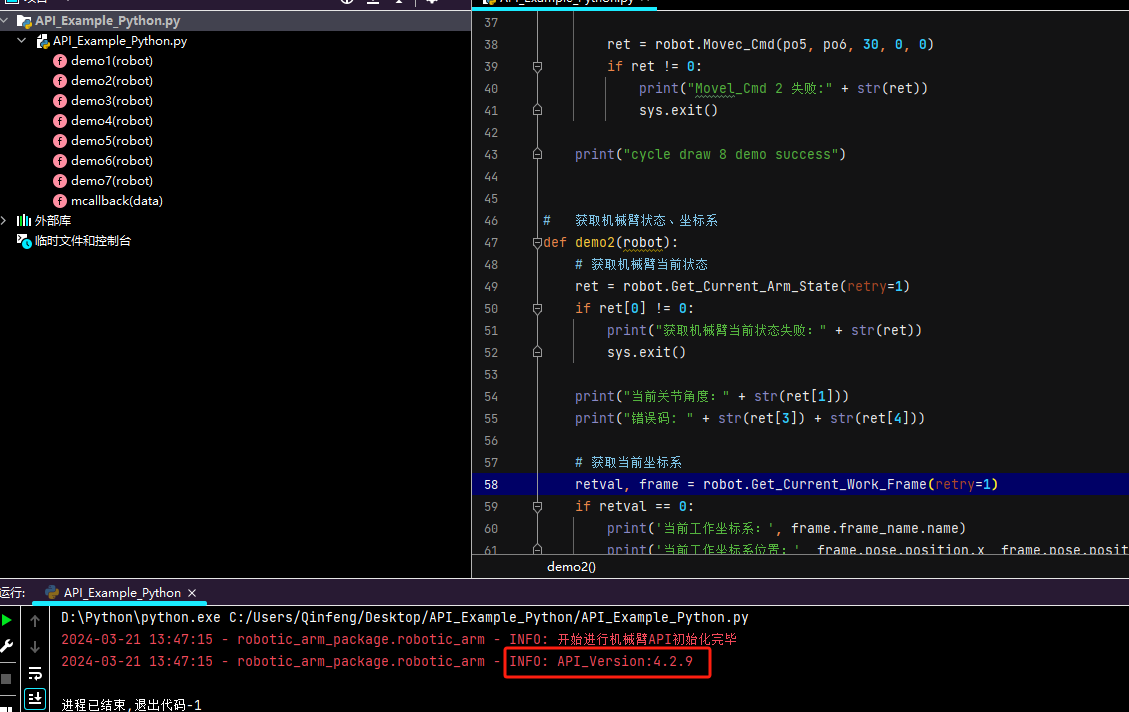
四、API 版本信息
方法 1: 根据 API 返回来判断。
方法 2:根据文档名称来判断
方法 3:根据库文件夹的名称来判断。
附件下载
0 条评论




撰写评论