

【睿尔曼-RealMan】睿尔曼超轻量仿人机械臂UDP 监听--python接口示例
Forrest 2023-11-29
一、Python语言开发环境
1.Win10系统下使用
开发环境
系统:win10
IDE:PyCharm
Python版本:python 3.11.2
SDK版本号:4.1.3
由于机械臂相关软件版本不定期更新,如果你使用的软件接口或协议与本文有出入,请联系官方技术人员及时更新。
项目创建&加载SDK(详细步骤请参考睿尔曼超轻量仿人机械臂--二次开发之Python 调用API接口 - 睿尔曼智能论坛 (realman-robotics.cn)
二、机械臂状态主动上报接口使用说明
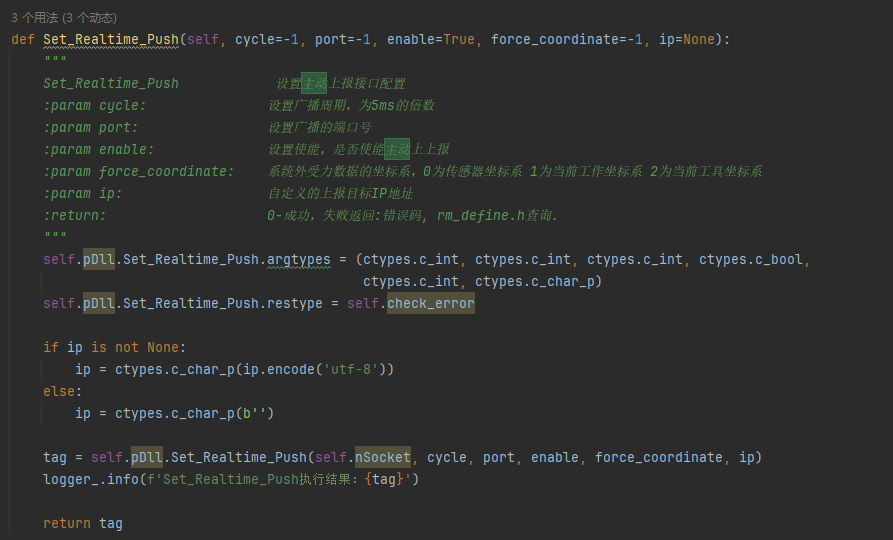
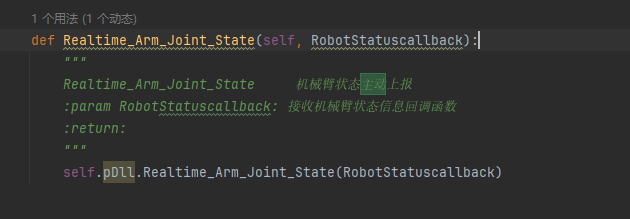
机械臂状态主动上报接口,使用时,需要和机械臂处于同一局域网络下,通过设置主动上报配置接口的目标 IP 或和机械臂建立 TCP 连接,机械臂即会主动周期性上报机械臂状态数据,广播的默认目标端口为 8089(可配置),使用 UDP 协议监听本机的8089 端口,即可收到数据,数据周期可配置,默认 5ms。
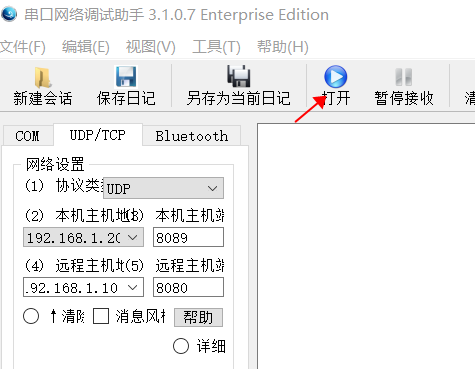
步骤一:打开Serial_Net_Debug_Assistant并设置本机地址

步骤二:选择UDP协议并设置调试网络地址、端口号

步骤三:打开监听模式,接收数据
显示监听数据:
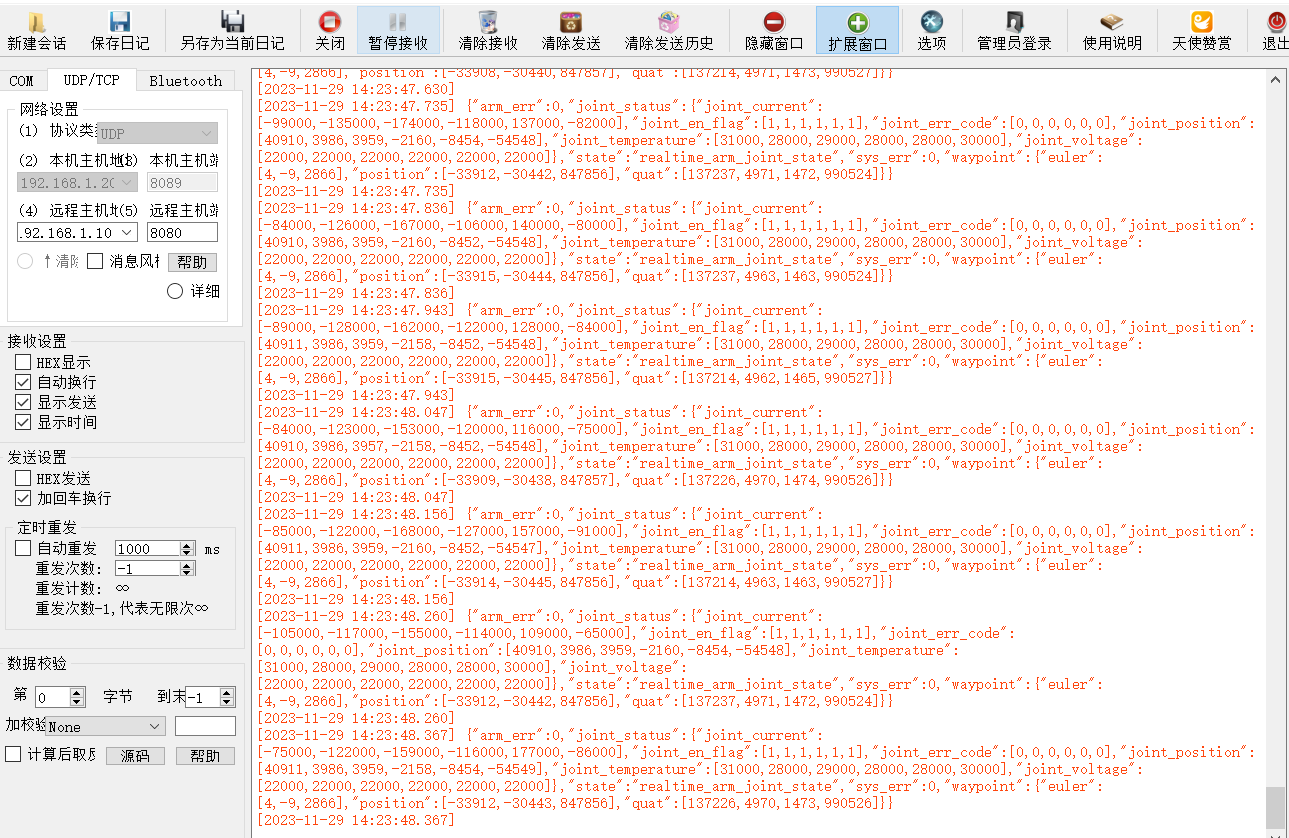
参数说明:
arm_err:机械臂错误码
sys_err:系统错误码
joint_status:当前关节状态
joint_current:当前关节电流,精度 0.001mA
joint_en_flag:当前关节使能状态 ,1 为上使能,0 为掉使能
joint_err_code:当前关节错误码
joint_position:当前关节角度,精度 0.001°
joint_temperature:当前关节温度,精度 0.001℃
joint_voltage:当前关节电压,精度 0.001V
waypoint:当前路点信息
position:当前路点位置,精度 0.000001M
euler:当前路点姿态欧拉角,精度 0.001rad
quat:当前路点四元数,精度 0.000001
更多信息可参考“睿尔曼机械臂JSON通信协议v3.5.6”
三、UDP主动上报python示例
程序块:

附件下载
0 条评论




撰写评论