

【睿尔曼-RealMan】睿尔曼超轻量仿人机械臂--睿尔曼机械臂与深度相机进行手眼标定
Forrest 2023-11-23
本教程主要介绍RM机械臂与Realsense D435相机用Python实现眼在手外标定的使用教程,本文中Python实现的代码已上传百度网盘,仅供参考。
链接:https://pan.baidu.com/s/1ITyItVkbbcJDOsxeEIaWaw?pwd=pno9 提取码:pno9
料中包含眼在手外及眼在手上两种视觉传感器的安装方式,可自行下载使用;
1. 开始前准备
- python 3.8及以上
- numpy 1.24.2
- scipy 1.10.1
- pyrealsense2 2.53.1.4623
- 一个标定板 棋格盘
- 机械臂
- D435相机

2. 采集数据
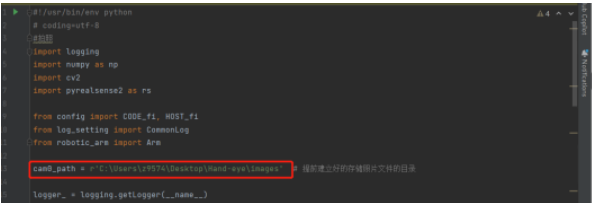
步骤一:运行采集脚本
进入data_collection_d435_win文件夹,修改main.py文件里cam0_path变量为想要保存标定板图片的文件夹路径。
步骤二:挪动机械臂末端
保持相机和机械臂基座不动,挪动机械臂末端,使标定板出现在屏幕上,选择清晰完整的图片点击键盘 "s"获取当前界面里的标定板图片和当前机械臂末端的位姿。采集十几组图片以及数据,图片保存到之前设置的标定板图片保存路径,位姿保存在相同路径下的poses.txt文件中。
3. 计算相机坐标系到机械臂基座坐标系的齐次变换矩阵(旋转矩阵和平移向量)
- 进入到文件夹out_of_hand_homogeneous_matrix中
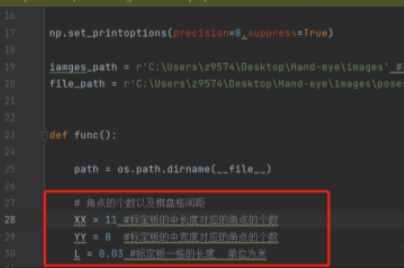
- 将python文件 main.py的数据源设置为上面采集数据时设置的路径
- 将python文件 main.py的 角点个数和棋盘格间距设置为实际使用的标定板
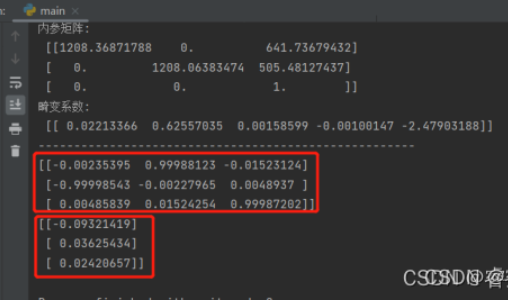
- 运行python文件计算相机坐标系到机械臂末端坐标系的齐次变换矩阵
- 输出旋转矩阵和平移向量
0 条评论




撰写评论