

【睿尔曼-RealMan】睿尔曼超轻量仿人机械臂--二次开发之C语言API接口使用
Forrest 2023-11-23
一、API文件简介
睿尔曼系列机械臂提供多种高级语言可用的API,可以根据所需进行选择。在这里,我将列举C语言的项目创建及接口使用。
本文章涉及的示例项目网盘链接如下:
链接:https://pan.baidu.com/s/1B_NBbbry_N-xUK83_ij5OA?pwd=exbr
提取码:exbr
二、C语言开发环境说明及接口使用
Win10系统下使用
1.开发环境
系统:win10
IDE:QT5.9.0
编译器:msvc2015及以上版本/mingw32
SDK版本号:4.1.3
2.项目创建&加载C语言SDK
在QT5.9.0下创建C语言项目,此处创建的项目为带有UI界面的项目,方便后期调试。
创建C语言项目
①第一步,点击文件打开“新建项目或文件”。

②第二步,在项目选择界面根据下图提示选择项目模板,并且点击“choose”按钮,进入下一步。

③第三步,填写项目名称与确认创建项目的路径。此处需注意:创建路径及文件夹不能有中文。

④第四步,选择KITS、Details、汇总信息。如下图,默认即可。我创建的项目名称为:untitled,创建路径为:C:\Users\TR



⑤第五步,项目创建完成,以下界面为项目创建成功显示。

加载SDK文件
①第一步,找到设备资料中的API文件夹,找到目录“RM-65\(2)API\C”下的“include”文件夹。复制此文件夹至创建完成的QT项目文件夹中。

②第二步,找到目录“RM-65\(2)API\C\windows”下的“win_x86_base_release_v4.2.5”文件夹,此处需根据各位电脑的实际情况选择相对应的文件。可选64位或86位。复制此文件夹至创建完成的QT项目文件夹中,并更改文件夹名称为“lib”。


③第三步,打开创建完成的QT项目,在QT项目界面中找到以项目名称命名的.pro文件,我这里的命名为untitled,文件名称为‘untitled.pro’。
④第四步,打开‘untitled.pro’文件,在文件末尾处添加以下两行代码:
INCLUDEPATH += $$PWD/include
LIBS+= -L$$PWD/lib -lRM_Bash
至此,项目创建&加载C++SDk到此结束,接下来可以进行代码的编写。
此处可以参照设备资料提供的示例工程进行编写,在此处仅做机械臂连接与机械臂MOVEJ运动接口的演示。如需使用更多接口,请打开include文件夹下rm_bash.h文件,查看接口说明及参数进行使用。
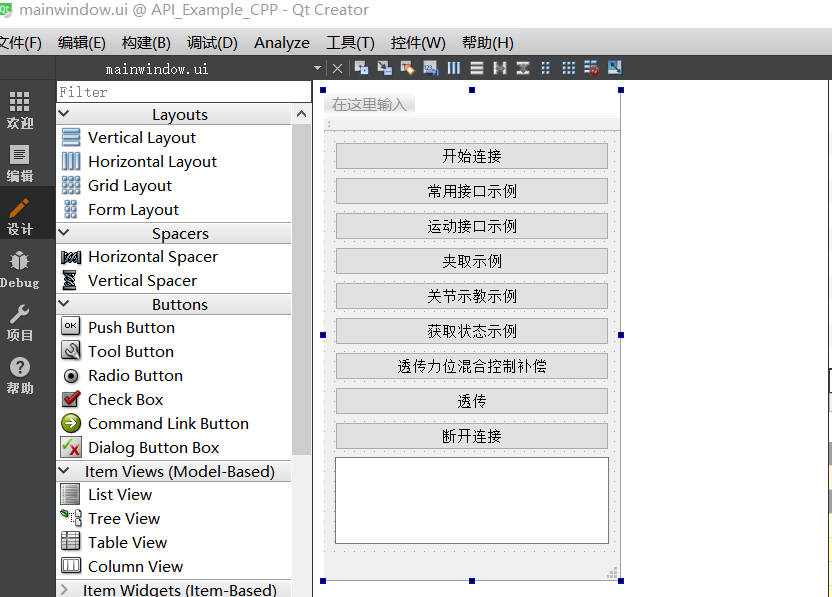
①第一步,选择QT项目的‘mainwindow.ui’文件,添加3个‘Push Button’按钮,并且分别更改按钮名称为连接机械臂、MoveJ运动、断开连接。添加1个‘Text Edit’文本框用来接收API接口返回的信息。
②第二步,修改设置的按钮与文本框的函数名称。在‘mainwindow.ui’文件中,右侧中进行设置。设置完成在设置完成的名称上右击鼠标,选择-->转到槽。即可跳转程序中。(每个按钮均需进行‘转到槽’操作,文本框无需此操作)
③第三步,添加m_sockhand 句柄。在QT项目中打开“mainwindow.h”文件,在文件中以下位置添加以下代码

④第四步,编写机械臂连接及测试程序。‘mainwindow’文件中程序如下:
1.#include "mainwindow.h"
2.#include "ui_mainwindow.h"
3.MainWindow::MainWindow(QWidget *parent) :
4. QMainWindow(parent),
5. ui(new Ui::MainWindow)
6.{
7. ui->setupUi(this);
8.}
9.
10.MainWindow::~MainWindow()
11.{
12. delete ui;
13.}
16.void MainWindow::on_Disconnect_clicked()
17.{
18. // 关闭连接
19. Arm_Socket_Close(m_sockhand);
20.}
22.void MainWindow::on_Test_MoveJ_clicked()
23.{
24. int ret;
26. float joint[6] = {0,0,0,0,0,0};
27. float joint1[6] = {0,0,90,0,90,0};
28. ret = Movej_Cmd(m_sockhand,joint1,30,0,1);
29. ui->textEdit->append(QString("机械臂运动第1个点").arg(ret));
30. ret =Movej_Cmd(m_sockhand,joint,30,0,1);
31. ui->textEdit->append(QString("机械臂运动第2个点").arg(ret));
32.}
34.void MainWindow::on_connect_Socket_clicked()
35.{
37. // 连接服务器 返回全局句柄
38. RM_API_Init(65,NULL);
39. m_sockhand = Arm_Socket_Start((char *)"192.168.1.18", 8080, 5000);
41.}
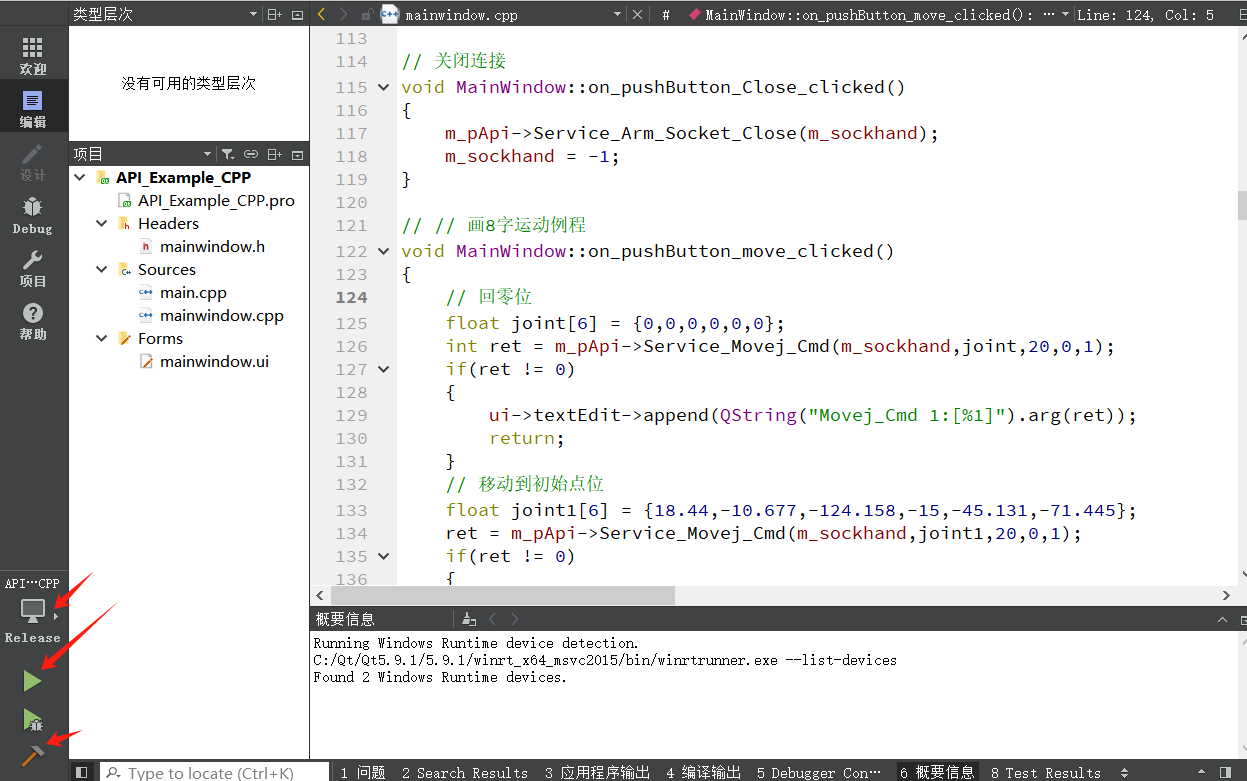
⑤第五步,程序构建及运行。构建程序需在QT软件中左下角构建套件根据库切换到对应的构建模式,此处选择“Release”。并点击下方构建按钮,如下图所示:

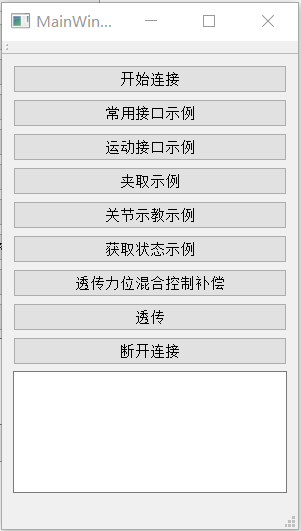
⑥第六步,运行程序。编译完成之后需要点击绿色运行按钮,启动程序会弹出如下界面,可通过点击按钮进行控制连接机械臂、机械臂运动、断开连接操作。点击机械臂运动按钮,机械臂会根据MoveJ_Cmd接口中6个关节角度运行。
Linux系统下使用
1.开发环境说明
系统:Ubuntu 18.04
IDE:QT Creator( 4.9.2)
编译器:默认
SDK版本号:4.1.3
2.项目创建&加载C语言SDK
Ubuntu下项目的创建及加载SDK,与win10下项目的创建方法大致相同。
不同点在于添加‘lib’文件夹时,win10下的‘RM_Base.dll’、‘RM_Base.lib’两个文件需替换为适用与Ubuntu系统的‘.so’文件。‘include’文件夹无需替换,直接复制即可。
适用于Ubuntu系统的库文件位于‘资料-->2.API-->C-->linux’文件夹下,根据自身系统的不同,选择合适的库文件即可。


3.API常用接口使用
此处可以参照设备资料提供的示例工程进行编写,在此处仅做机械臂连接与机械臂MOVEJ运动接口的演示。如需使用更多接口,请打开include文件夹下rm_bash.h文件,查看接口说明及参数进行使用。
①第一步,选择QT项目的‘mainwindow.ui’文件,添加‘Push Button’按钮,并且分别更改按钮名称为连接机械臂、MoveJ运动、断开连接。添加1个‘Text Edit’文本框用来接收API接口返回的信息。

②第二步,修改设置的按钮与文本框的函数名称。在‘mainwindow.ui’文件中,右侧中进行设置。设置完成在设置完成的名称上右击鼠标,选择-->转到槽。即可跳转程序中。(每个按钮均需进行‘转到槽’操作,文本框无需此操作)
③第三步,添加m_sockhand 句柄。在QT项目中打开“mainwindow.h”文件,在文件中以下位置添加以下代码:
//手动维护句柄
SOCKHANDLE m_sockhand = -1;
④第四步,编写机械臂连接及测试程序。‘mainwindow.cpp’文件中程序如下:
1.#include "mainwindow.h"
2.#include "ui_mainwindow.h"
3.
4.MainWindow::MainWindow(QWidget *parent) :
5.QMainWindow(parent),
6.ui(new Ui::MainWindow)
7.{
8.ui->setupUi(this);
9.}
10.
11.MainWindow::~MainWindow()
12.{
13.delete ui;
14.}
15.
16.
17.void MainWindow::on_Disconnect_clicked()
18.{
19.// 关闭连接
20.Arm_Socket_Close(m_sockhand);
21.}
22.
23.void MainWindow::on_Test_MoveJ_clicked()
24.{
25.int ret;
26.
27.float joint[6] = {0,0,0,0,0,0};
28.float joint1[6] = {0,0,90,0,90,0};
29.ret = Movej_Cmd(m_sockhand,joint1,30,0,1);
30.ui->textEdit->append(QString("机械臂运动第1个点").arg(ret));
31.ret =Movej_Cmd(m_sockhand,joint,30,0,1);
32.ui->textEdit->append(QString("机械臂运动第2个点").arg(ret));
33.}
34.
35.void MainWindow::on_connect_Socket_clicked()
36.{
37.
38.// 连接服务器 返回全局句柄
39.RM_API_Init(65,NULL);
40.m_sockhand = Arm_Socket_Start((char *)"192.168.1.18", 8080,5000);
41.
42.}
⑤第五步,程序构建及运行。构建程序需在QT软件中左下角构建套件根据库切换到对应的构建模式,此处选择“Release”。并点击下方构建按钮,如下图所示:
⑥第六步,运行程序。编译完成之后需要点击绿色运行按钮,启动程序会弹出如下界面,可通过点击按钮进行控制连接机械臂、机械臂运动、断开连接操作。点击机械臂运动按钮,机械臂会根据MoveJ_Cmd接口中6个关节角度运行。





撰写评论