

【睿尔曼-RealMan】睿尔曼超轻量仿人机械臂--Modbus TCP介绍
Forrest 2023-11-18
准备工作:ModScan32应用程序、一根网线、一台电脑
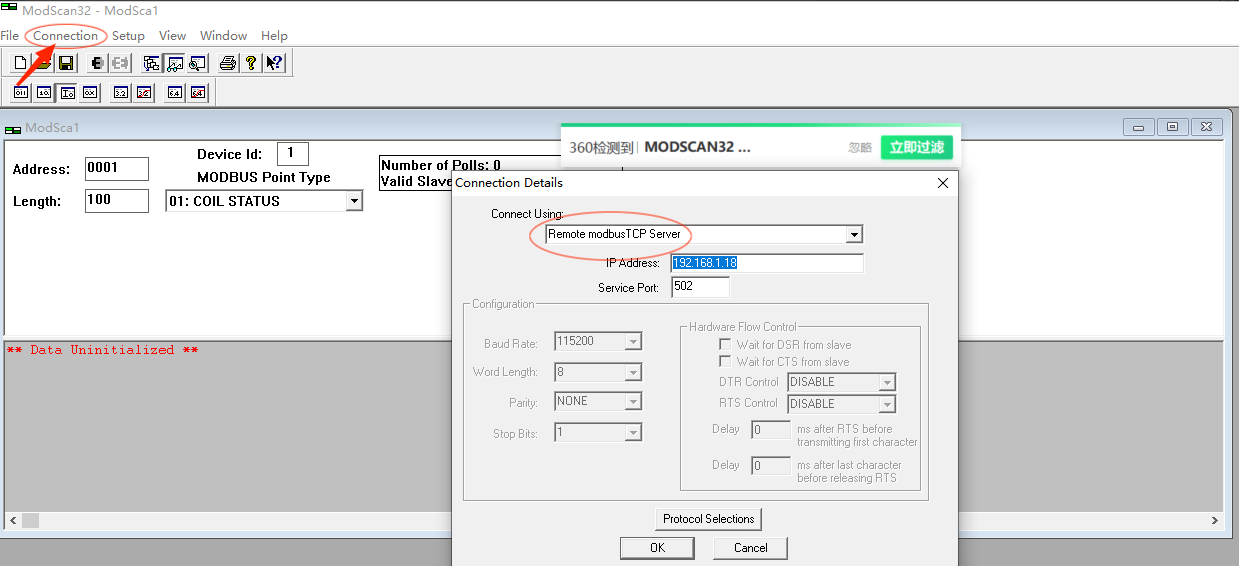
步骤二:选择modbus tcp 协议
进行连接前需将本地电脑通过网线与机械臂相连。
本地电脑ip:192.168.1.xx,机械臂默认ip:192.168.1.18;“Connect Using”选择Remote modbus TCP Server;“IP Address”为192.168.1.18;“Service Port”为502;点击“OK”进行连接。
步骤三:连接成功界面
连接成功后将会看到数据展示区有数据在不断刷新,同时“地址功能码设置区”中的Valid slave responses、Number of poll的值也会保持不断刷新。
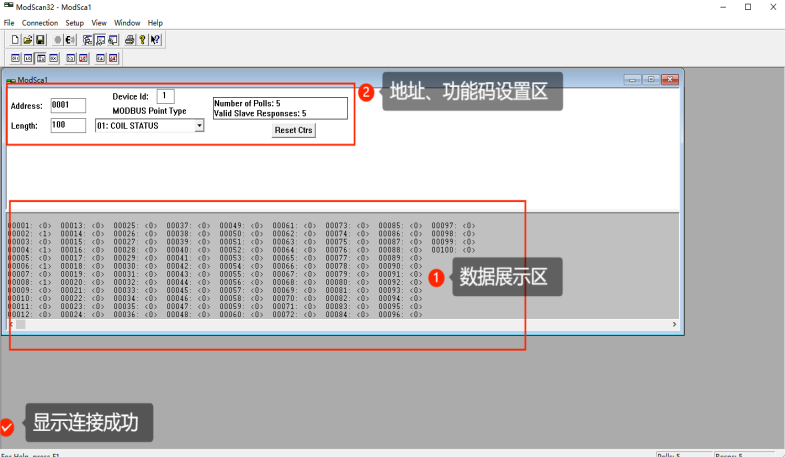
步骤四:可以在下列选项切换不同的寄存器
MODBUS Point Type下有4个寄存器,分别是:01线圈寄存器;02离散输入;03保持寄存器;04输入寄存器。

示例一 打开控制器VOUT输出电压
首先选择03:HOLDING REGISTER即保持寄存器,找到地址40001,双击打开可看到其Address值为1,对应着寄存器中的40001;然后根据modbusTCP_slave地址对应表介绍,更改value的值,然后点击Update开始对VOUT(对外输出电压)进行设置。

示例二 指定编号运行编程程序
首先选择03:HOLDING REGISTER即保持寄存器,找到地址40002,双击打开可看到其Address值为2,对应着寄存器中的40002。
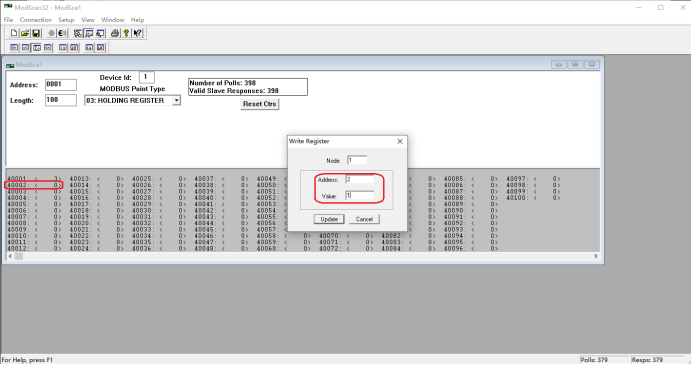
根据睿尔曼公司提供的modbus TCP_slave地址对应表介绍,更改Value的值点击Update运行其代表的程序(如下图):

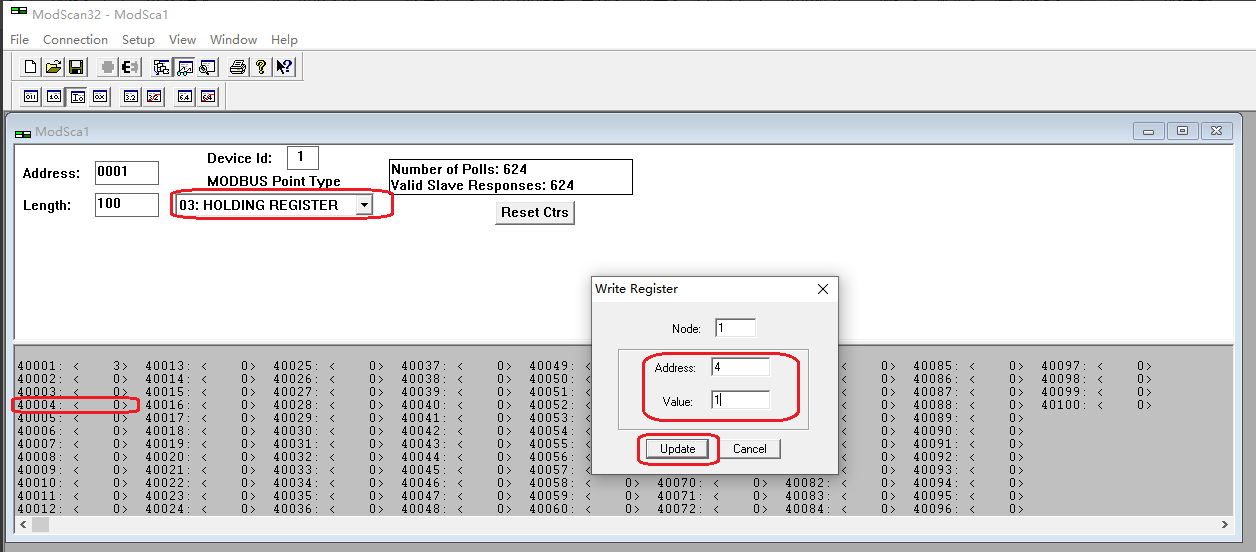
示例三 控制编程程序
在机械臂运动过程中,可通过03:HOLDING REGISTER即保持寄存器,找到寄存器中的40004,双击打开更改Value的值(输入1-3的数据),点击Update运行,控制器检测到后,即清零,然后执行相对应的动作。1代表急停、2代表暂停、3代表继续(根据睿尔曼公司提供的modbus TCP_slave地址对应表)。
示例四 机器人状态读取
选择04:INPUT REGISTER即输入寄存器,可根据睿尔曼公司提供的modbus TCP_slave地址对应表。来查看数据展示区地址30001至30100的含义。

▶modbus TCP相关地址,可以参考《睿尔曼机器人WEB示教器用户手册》-第11节。




撰写评论