

【睿尔曼-RealMan】睿尔曼机器人快速使用手册V1.5
Forrest 2023-11-18
关于本手册
本手册为机器人操作的快速入门手册,旨在短时间内提升客户对机器人的熟知度。
操作前提
操作机器人前,请务必仔细阅读《睿尔曼机器人用户手册》,用户需在了解安全知识的基础上才可使用机器人,该手册可以扫描机械臂铭牌上的二维码或直接访问官网下载。
目标群体
操作人员
产品技术人员
技术服务人员
机器人程序员
手册说明
本手册内容会有补充和修改,请经常留意我公司网站,更新操作手册。
感谢您购买和使用本公司研发的超轻量协作机器人系列机器人。我司研发的机器人包含RM65、RM75、RML63、ECO系列,使用过程均可参考此说明。
RM65、RM75、RML63、ECO系列机器人为睿尔曼智能科技(北京)有限公司推出的协作机器人。机器人采用关节模块化设计,底部集成控制器,无需控制柜。用户可根据我们提供的应用程序接口,搭建自己的机器人控制平台。此外,机器人配有专用可编程操作界面,用户可通过此界面实时观察机器人的运行状态,对机器人进行控制设置,WEB示教器支持机器人在线仿真功能,但不支持脱机离线仿真。
一、产品组成
一套完整的睿尔曼协作机器人产品组成如下所示:


RM65-B机器人整体组成示意图

机器人电气接口说明

机器人电气接口功能说明
二、机器人快速安装
RM65机器人安装简要步骤:
1、准备四个M6的内六角螺栓和M6的内六角扳手。
2、从包装箱中取出RM65机器人,安装到底座。


基座安装尺寸
对于末端工具的安装,机械臂本体提供的标准法兰接口,用户需要根据安装工具的安装尺寸进行适配。机械臂法兰盘预留均匀分布在Ф49mm分度圆上的6个M4螺纹孔,具体尺寸如下图所示。

三、机器人接线与开机
1、从包装箱中取出RM65机器人的DC24V电缆。
2、准备DC 24V 的供电电源(电源电压范围可选20~27V,极限可以达到30V,建议使用600W以 上, 且具有打嗝模式、恒流输出1S功能的开关电源),机械臂供电接口为2芯航插,位于控制器面板左下角,2芯电源线缆中棕色线芯为电源正极,蓝色线芯为电源负极。
3、机器人不得暴露在灰尘或超出IP54等级的潮湿环境下。密切注意存在传导性灰尘的环境中,需要特殊防护。
4、连接机器人线缆。若无外部设备,只需要连接电源线与网线即可。如下图:

Ø 检查电源线与电源插头是否连接好。
Ø 检查控制器电源开关在未接通时处于关闭状态。
Ø 确保机器人不会碰到周围人员或设备。确保电源线已连接24V直流电源。
Ø 按下电源开关,①电源开关背景灯变为蓝色,说明机械臂上电。②同时机器人控制器右上角指示灯变为蓝色,说明控制器正在启动,③控制器指示灯变为白色,说明机器人关节等正在进行初始化工作。④控制器指示灯变为绿色闪烁状态,说明机器人启动完成,可正常开始工作。此过程用时大约50s左右。

四、示教器连接
机械臂示教器软件为web端软件,在浏览器直接登陆即可(推荐使用谷歌浏览器)。通过此人机交互界面,可以操作机器人本体和控制器,执行和创建机器人程序、读取机器人信息。
可根据使用场景,选择不同的示教器载体,示教器支持全平台使用,如安卓平板、Windows系统的平板或电脑、苹果系统的平板或电脑、Linux系统的电脑。示教器载体与机械臂连接可选择有线或无线两种方式,在电脑端使用示教器。
有线连接:
Windows系统与机械臂建立有线连接时,首先需要将电脑ip更改到192.168.1.xx网段,xx可为除192.168.1.18中“18”以外的ip,建议配置为192.168.1.100。

(1)右击电脑右下方WIFI按钮打开“网络和Internet设置”{注:win11点击后须先点击<高级网络设置,再点击更多网络适配器选项后立即进入(3)以太网选项>}

打开网络和Internet设置示意图
(2)单击“以太网-->更改适配器选项”

本地连接示意图
(3)双击“以太网”并打开,并且在弹出的窗口中单击“属性”按钮。


属性示意图
(4)在弹出的对话框中,第一步选中“Internet协议版本4”,第二步单击“属性”按钮。
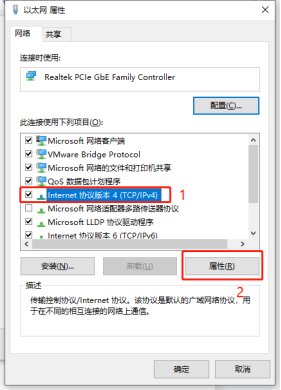
协议版本示意图
(5)按下图配置网络IP地址,配置完成后点击“确定”按钮,即可完成本地网络设置。

网络IP地址示意图
无线连接:
默认WIFI名称格式如下图所示,密码默认为12345678

WIFI名称格式
(1)打开浏览器,若使用有线连接,则网址输入192.168.1.18。

输入网址
(2)若使用无线的AP模式连接,则网址输入192.168.33.80。
(3)输入账号:user,密码:123,点击登录即可进入机器人控制界面。

五、示教器界面

机器人示教面板(注:若连接示教器后出现页面卡顿后可以ctrl+F5 刷新页面)
机器人示教面板各功能区域名称

六、拖动示教

在机械臂末端法兰外壳上有两个按钮,分别控制机器人进行拖动示教和轨迹复现。
长按机械臂末端绿色按钮,机械臂将处于可拖动状态,拖动机械臂末端进行轨迹记录,松开绿色按钮即完成轨迹记录。末端按钮位置如图所示。
短按机械臂末端蓝色按钮,机械臂自动回到轨迹起始位置,并进行一次轨迹复现(机械臂只复现最后一次记录的拖动轨迹)。
七、机器人关机
1、 按下电源开关,使其处于弹起关闭状态;
2、 关闭机器人24V直流供电电源。
八、更多资料

公司地址:
睿尔曼智能科技(北京)有限公司
地址:北京市石景山区杨庄大街69号首特钢园创新工场A2层
睿尔曼智能科技(江苏)有限公司
地址:江苏省常州市常州科教城智能数字产业园7号厂房
睿尔曼智能科技(深圳)有限公司
地址:广东省深圳市宝安区华丰国际机器人产业园一期A栋5楼




撰写评论