

睿尔曼超轻量仿人机械臂之姿态控制Coding原理及实例
harry@realman-robot.com 2025-07-14
背景:针对于大家想要根据睿尔曼的Api来实现只动姿态运动像示教器的只动姿态的Button如下。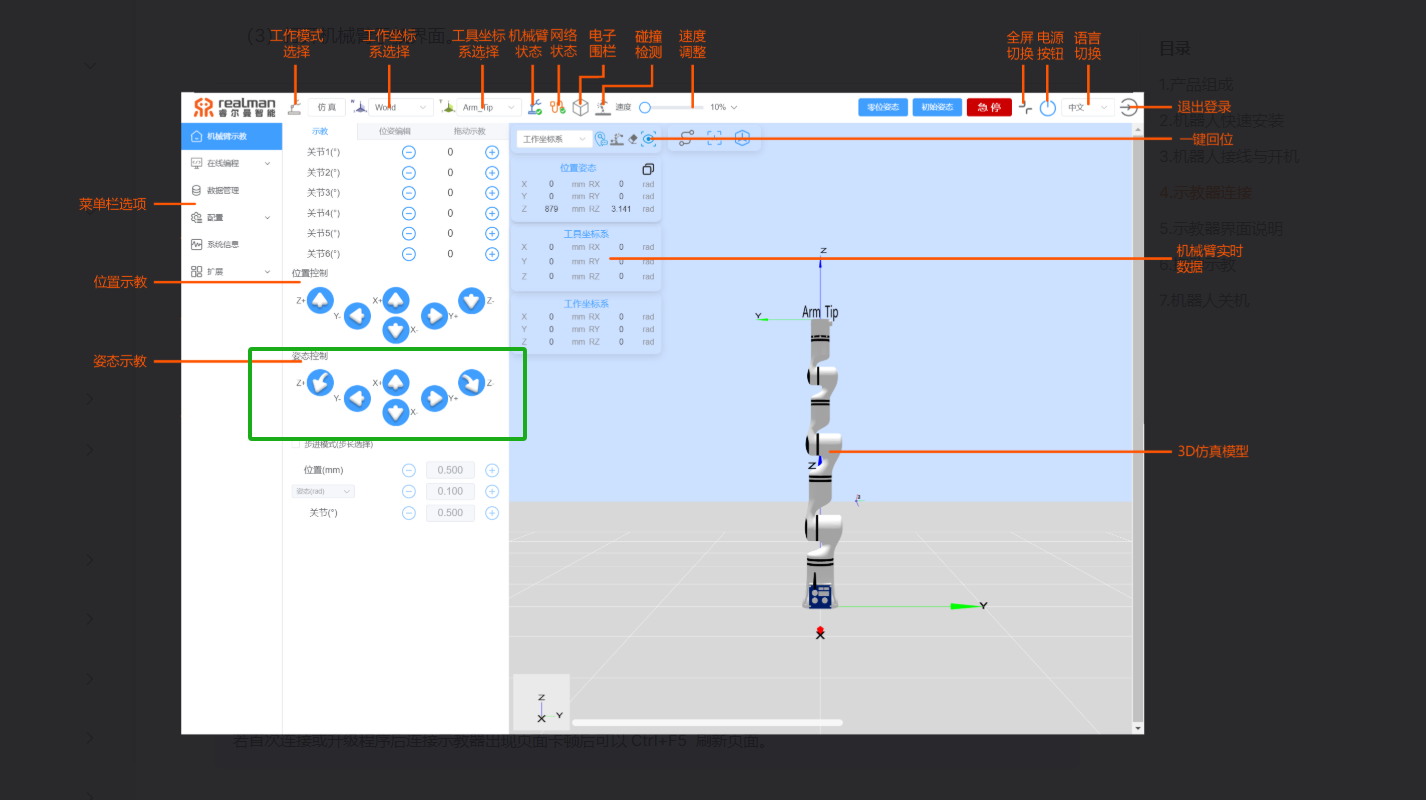
针对于姿态的三个轴是耦合的,不能直接进行数值上的加减,推荐的方式如下:
(1)记录当前位姿pose0,将姿态rpy转成旋转矩阵R0备用
(2)计算增量旋转矩阵dR,以绕x为例,dR=rotx(sin(t))
(3)计算更新后的R:R = dR * R0
(4)将R转换为四元数或者欧拉角,再下发
具体Coding,参考如下:
https://gitee.com/liangzilixue1/rm_harry/blob/RmApi2Demo/RM_Api_Python_V1.05_Demo/pos2.py
0 条评论




撰写评论