

4种遥操作优劣势
harry@realman-robot.com 2025-07-14
一、按技术原理分类
这是最常见的分类方式,核心差异在于 “如何捕捉运动信号”。
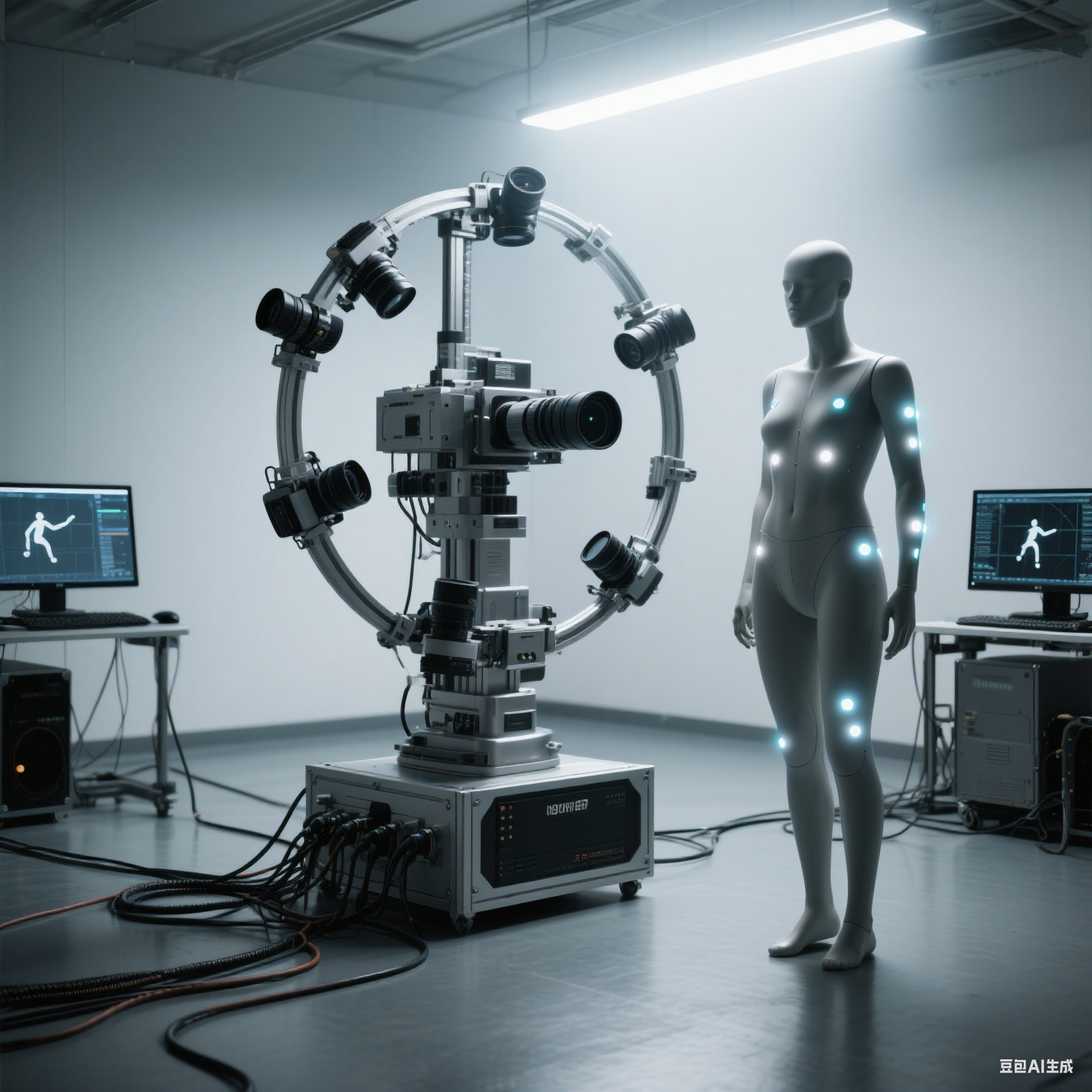
1. 光学动捕设备
通过摄像头捕捉特定标记物的位置变化,实现运动追踪,是目前精度最高的动捕技术之一。
被动光学动捕:在捕捉对象上粘贴反光标记点(如高亮小球),通过红外摄像机发射红外线,标记点反射光线后被摄像机接收,计算位置信息。
优势:精度高(0.1mm),标记点轻便、可标示多个主体,
劣势:末端位姿映射,会遇到奇异点,时延较大。成本高、占用空间大。遮挡后会丢失信号。
2. 惯性动捕设备
基于惯性测量单元(IMU)捕捉运动,IMU 通常包含加速度计、陀螺仪和磁力计,通过测量加速度、角速度和磁场方向计算姿态。
优势:无需外部设备,可在任意环境使用(不受空间限制),便携性强,相对外骨骼动捕比较轻便,
劣势:末端位姿映射,会遇到奇异点,时延较大。长期使用会累积误差(需定期校准),精度略低于光学动捕。

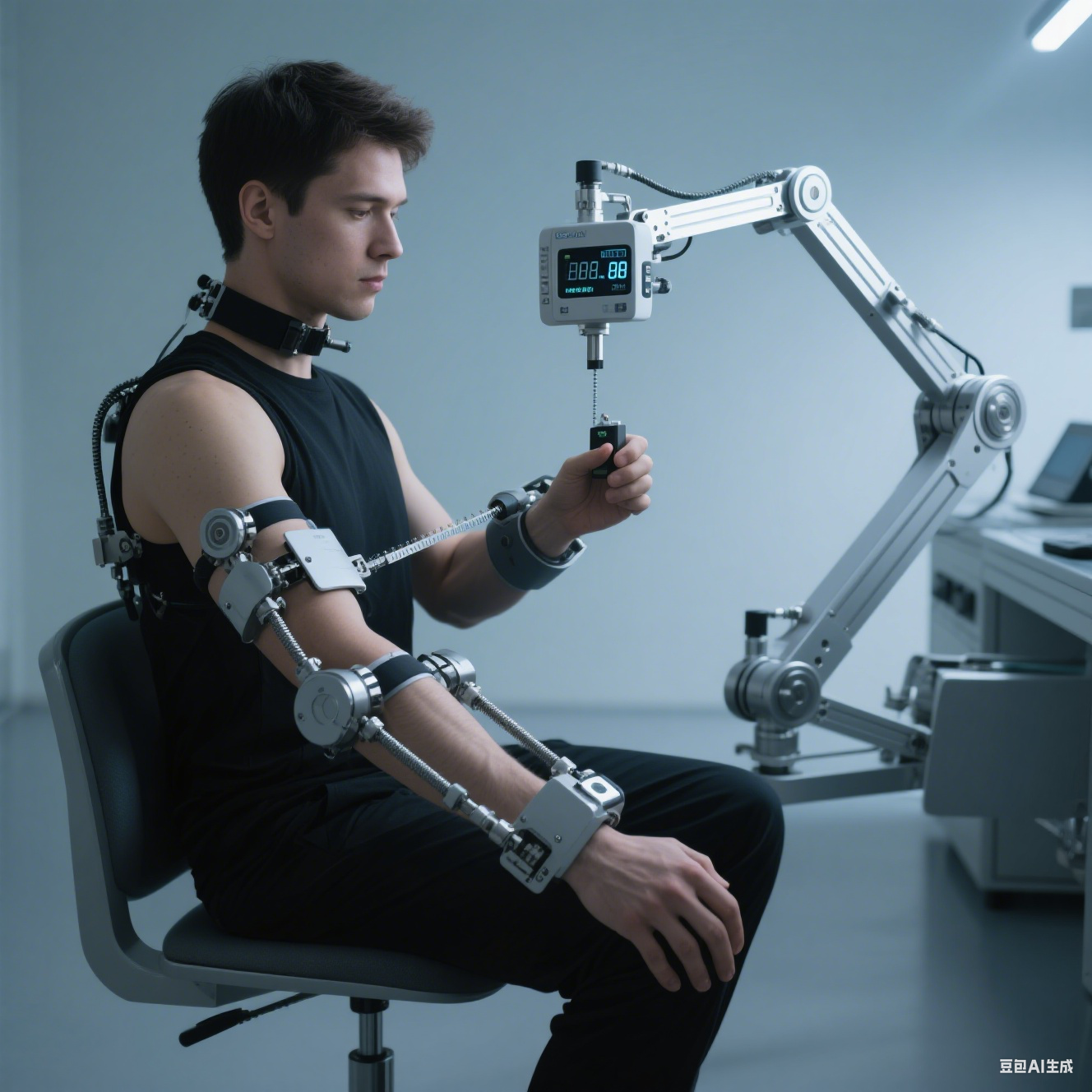
3. 机械动捕设备
通过机械连杆、编码器直接测量肢体运动角度,如机械臂、数据手套等。
优势:关节角度映射,无需考虑逆解,不会遇到奇异点。精度极高,无环境干扰,跟随效果最好。
劣势:设备笨重,限制动作灵活性,仅适用于小范围、重复性动作捕捉。
典型应用:aloha。
4. 视觉惯性融合动捕(VR)
结合光学和惯性技术的混合方案,通过光学定位修正惯性测量的累积误差,平衡精度与抗干扰性。
优势:便携性强,有头显,可以实时获知机器人传感器信息
劣势:末端位姿映射,会遇到奇异点,时延较大
典型应用:AR/VR 头显的位置追踪(如 Quest 、PICO 系列头显)、无人机自主导航。




撰写评论