

机械臂工具坐标系的六点法标定
Ron 2024-11-06
一、基本步骤
(1)在机器人动作范围内找一个非常精确的固定点作为参考点;
(2)在工具上确定一个参考点(最好是工具中心点Tool Center Point, TCP);
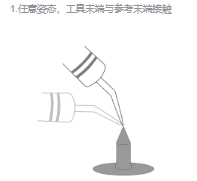
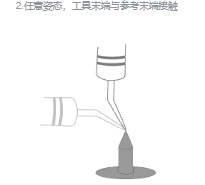
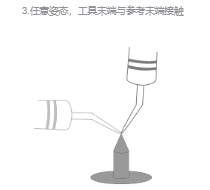
(3)手动操纵机器人的方法移动TCP,以四种不同的工具姿态与固定点刚好碰上。
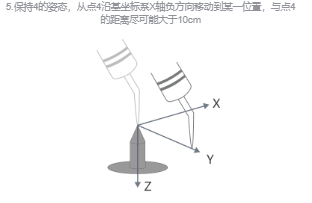
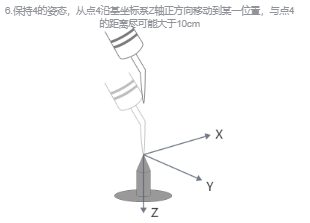
(4)前三个点任意姿态,第四点是用工具的参考点垂直于固定点,第五点是工具参考点从固定点向将要设定的TCP的x方向移动,第六点是工具参考点从固定点向将要设定的TCP的在z方向移动。如下图所示。

(5)通过前4个点的位置数据即可计算出TCP的位置,通过后2个点即可确定TCP的姿态。
二、标定过程
1、TCP位置标定
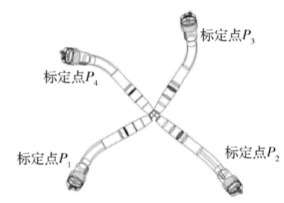
假设取1、2、3、4四个标定点之间相差90°且不在同一平面上,如下图所示:
给定如下坐标定义:
基坐标系:B 末端坐标系:E 工具坐标系:T
给定如下变换矩阵定义:
末端坐标系 E 相对于基坐标系 B的变换关系:
工具坐标系T 相对于末端坐标系 E的变换关系:
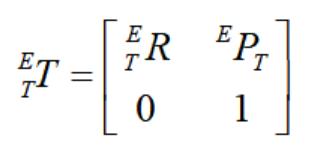
工具坐标系T 相对于基坐标系 B的变换关系:
可知:
对于选定位置点i = 1、2、3、4,有:
(1) 不等,设:
不等,设: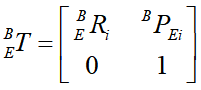
(2) 不等,但其位置相等,设:
不等,但其位置相等,设: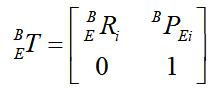
(3) 不等,但其位置相等,设:
不等,但其位置相等,设:
所以有:
在实际中, 由机器人正解方程可以直接测得,因此,我们直接读取四个位置点的姿态
由机器人正解方程可以直接测得,因此,我们直接读取四个位置点的姿态 和位置
和位置 ,假设:
,假设:
两式相减可得:
同理可得:
由上式可得:
 为 3x1 列向量,而等式右边为 9x3的矩阵,因此上式方程为不相容方程组,不可直接用非齐次线性方程组求解的方法或者solve求解。采用最小二乘法的矩阵形式,因其系数矩阵不是方阵,不可直接求逆, 因此使用广义逆。采用高斯消元法得到:
为 3x1 列向量,而等式右边为 9x3的矩阵,因此上式方程为不相容方程组,不可直接用非齐次线性方程组求解的方法或者solve求解。采用最小二乘法的矩阵形式,因其系数矩阵不是方阵,不可直接求逆, 因此使用广义逆。采用高斯消元法得到:
则上式所求得的 即为TCP的位置向量。
即为TCP的位置向量。
2、TCF姿态标定
前面已经得到工具坐标系(TCF)的位置,而计算TCP姿态采用z/x方向标定。此过程中TCF的姿态保持不变,取第一个姿态标定点为位置点4;机器人从位置点4出发,沿-x方向移动一定距离得到位置点5;机器人从位置点4出发,沿+z方向移动一定距离得到位置点6。
由于3个标定点中的TCF姿态不变,所以 均相等,
均相等, 保持不变,故可得到工具坐标系 T 的 x 轴轴向向量X,且:
保持不变,故可得到工具坐标系 T 的 x 轴轴向向量X,且:
同理,可得到工具坐标系 T 的 z 轴轴向向量Z,且:

进而由右手定则得工具坐标系 T 的 y 轴轴向向量 Y:

为进一步保证坐标系矢量的正交性,重新计算Z :

将X,Y,Z进行单位化得到 ,
, ,
, ,得到工具坐标 T 相对于基坐标 B 的姿态
,得到工具坐标 T 相对于基坐标 B 的姿态 ,且
,且 ,又末端坐标系 E 旋转矩阵为
,又末端坐标系 E 旋转矩阵为 ,且:
,且:

可得到工具坐标系的旋转矩阵 ,即:
,即:
3、标定结果
得到工具坐标系 ,标定为:
,标定为:
显然,TCF六点法标定的最小条件是能够获取到6个位置点的位姿 ,且为使式
,且为使式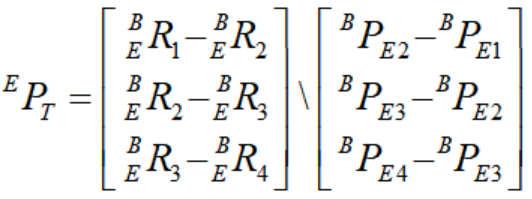 有解,应保证位置点1,2,3,4不在同一平面上。
有解,应保证位置点1,2,3,4不在同一平面上。




撰写评论