

机械臂软限位与硬限位的区别及超限位解决办法
Ron 2024-11-04
什么是软限位和硬限位?
硬限位是一种机械结构装置,用于限制机械臂的运动范围。它是通过物理的阻挡方式,当机械臂的某个关节或末端执行器运动到极限位置时,机械部件(如限位块、挡销等)之间相互碰撞或接触,从而阻止机械臂继续向超出安全范围的方向运动。
软限位是通过软件程序和传感器来限制机械臂的运动范围。它利用机械臂关节处的编码器或其他位置传感器来实时监测关节的角度或位移,然后将这些数据反馈给控制系统。控制系统根据预先设定的运动范围参数,当机械臂接近或达到极限位置时,通过控制算法降低机械臂的运动速度,并最终停止机械臂的运动,使其保持在安全范围内。一般来说,机械臂的软限位小于硬限位的。
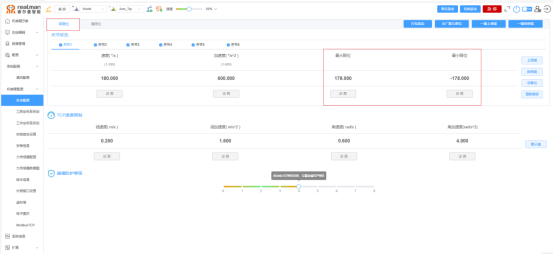
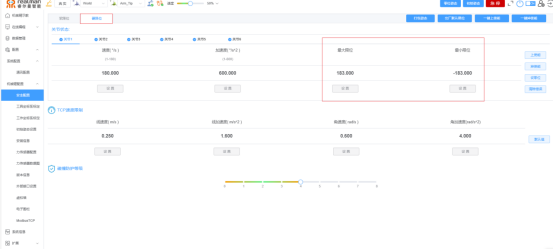
在示教器中可以查询到各个关节软限位和硬限位。
机械臂超限位如何解决?
对于带抱闸的关节:
1.在机械臂示教界面查看当前关节角度。
2.在配置-机械臂配置-安全配置中选择对应关节,将关节限位调大。
3.在系统信息界面清除关节错误。
4.在配置-机械臂配置-安全配置中选择对应关节,点击上使能按钮。
5.在机械臂示教界面,控制关节回到限位内。
6.在配置-机械臂配置-安全配置中选择对应关节,掉使能、将限位修改为默认值,重新上使能即可。
对于末端不带抱闸的关节(如RML63末端2个关节不带抱闸),手动转动到限位内,清除错误,上使能即可。
0 条评论




撰写评论