

使用Visual Studio开发睿尔曼机械臂环境配置
Ron 2024-10-08
一、环境准备
•RM65-B机械臂
•Visual Studio软件
•睿尔曼API1
二、Windows环境使用说明
•MSVC2015 或更高版本:Microsoft Visual C++ 2015(MSVC2015)或更新的版本是推荐的编译器,它与Windows系统兼容性良好,且支持最新的C语言标准。使用MSVC可以方便地编译和调试C++语言编写的睿尔曼机械臂控制程序,本文采用Visual Studio 2022进行环境配置。
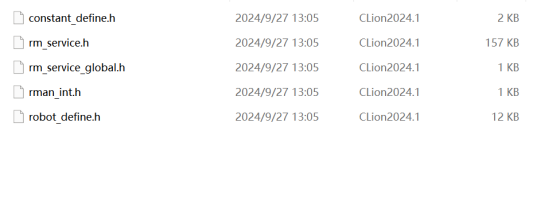
•头文件说明(部分):
1.rm_define.h:机械臂自定义头文件,包含了定义的数据类型、结构体。
2.rm_service.h:机械臂自定义头文件,声明了C++语言机械臂操作接口
3.rm_service_global.h:机械臂自定义头文件,定义编译Windows C++版本库时导出宏。
三、代码结构
代码结构如下:
RMDemo_VisualStudio_Project
├── RMDemo_VisualStudio_Project.sln # 解决方案文件
├── include
│ ├── rm_define.h # 机械臂二次开发包头文件,包含了定义的数据类型、结构体口
│ └── rm_service.h # 机械臂二次开发包头文件,声明了C++机械臂所有操作接口
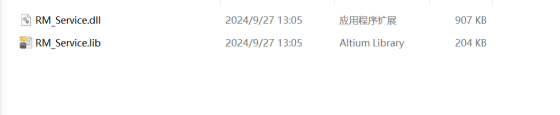
├── lib
│ ├── RM_Service.dll # Windows 的 API 库(默认release 64bit)
│ └── RM_Service.lib # Windows 的 API 库(默认release 64bit)
├── RMDemo_VisualStudio_Project #源代码文件夹
四、环境配置步骤
4.1创建项目
•创建工程文件夹,再在工程文件夹中创建include文件夹,在里面放入所需要的头文件,include文件夹目录如下:
•再在工程文件夹中创建lib(release版本)文件夹,在里面放入所需要的动态链接库,lib文件夹目录如下:
•打开Visual Studio,选择“创建新项目”。
•在“创建新项目”对话框中,选择“控制台应用”或适合你需求的C/C++项目类型,然后点击“下一步”。
•选择工程文件夹,然后填写项目名称、位置等信息,然后点击“创建”。
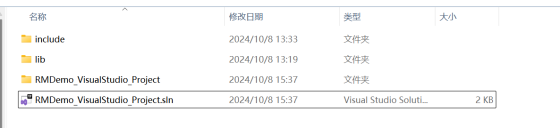
最后创建的文件目录如下:
4.2包含头文件和动态链接库
•点击项目的属性页,进行头文件和动态链接库的配置。
•再点击C/C++的常规选项,再附加包含目录里添加include的路径,如下图所示。

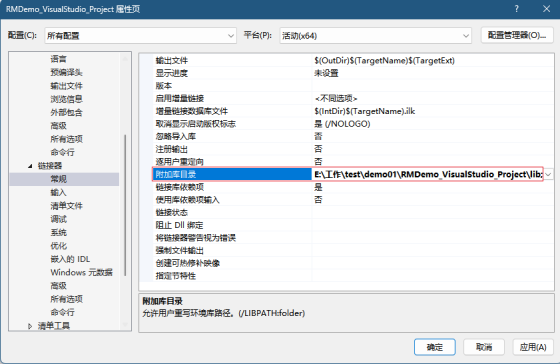
•随后点击链接器的常规选项,再附加库目录中添加lib文件夹的路径。
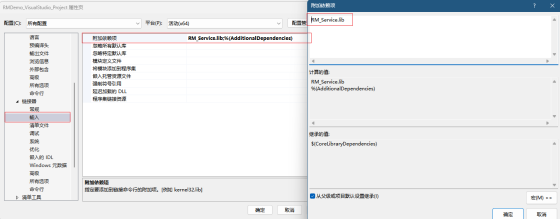
•在输入选项中的附加依赖项添加名称为RM_Service.lib的动态链接库。
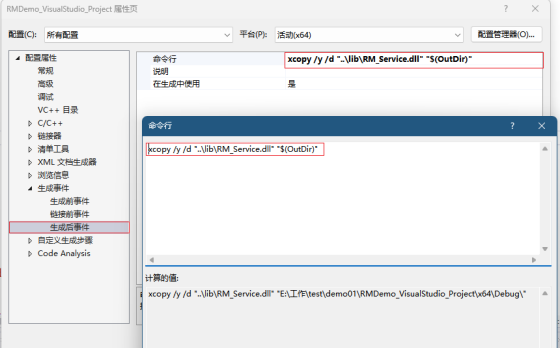
•项目属性页中,选择“配置属性”>“生成事件”>“生成后事件”。在”命令行“字段中选择编辑打开编辑控件,输入以下命令:
xcopy /y /d "..\lib\RM_Service.dll" "$(OutDir)"
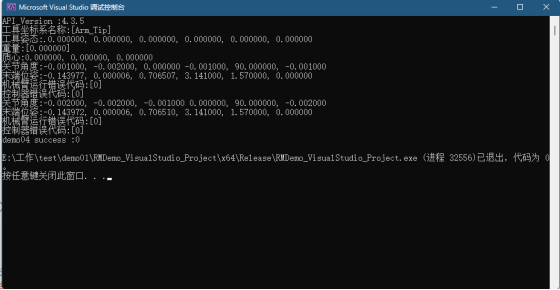
最后调用睿尔曼机械臂的API即可,输出如下图所示。




撰写评论