

【睿尔曼-RealMan】具身智能双臂开发平台用户手册
Ron 2024-06-14
版本声明
本手册内容受版权保护,版权归睿尔曼智能科技(北京)有限公司所有,并保留一切权利。未经许可,不得以纸质、电子的或其它任何方式文档进行复制和传播。
一、前言
Mobile ALOHA 是斯坦福大学符博士领导的研究团队开发的一套全开源全身遥操作系统,通过模仿学习算法与静态 数据共同训练,仅用 50 个示教,双臂机器人就熟练的实现了自主完成复杂的操作任务。为提升机器人移动性和灵活性,Mobile ALOHA 通过人类的遥操作示教运动,收集双手和全身控制的动态操作任务数据,最后依托 Mobile ALOHA 收集的丰富数据,通过端到端迁移学习来训练和纠正复合机器人的协同进化速度和精细化控制能力,使机器人具备成功克隆人类行为和任务的能力。Mobile ALOHA 为机器人学习和操作研究提供了一个经济高效的解决方案,使得更多的研究者和开发者能够参与到这一领域中来,让真正能够完成实际场景任务的家政机器人量产成为可能。睿尔曼智能科技有限公司致力于让公司的超轻量机械臂成为易用、智能、通用的作业工具走进千行百业和千家万户。为此,开发了一套基于睿尔曼机械臂的具身智能双臂开发平台。
二、产品概述
双臂机器人在工业、家居、办公、医疗等场景都有着广泛的应用前景。在工业场景,双臂可以协同工作,完成相比单臂机器人更精细的装配任务。在服务行业,双臂机器人可以在家庭、养老和医疗机构中更自然地提供清洁、照顾老人等服务。双臂机器人的开发和应用涉及许多技术和挑战,真实数据的获取是其中一个重要问题,包括:数据采集方法、采集成本、数据多样性、数据的有效性等。从示教中模仿学习,在机器人技术中表现出了令人印象深刻的表现。然而,大多数研究都集中在桌面操作上,缺乏日常家居和办公任务所需的移动性和灵活性。因此,合适的带移动底盘的双臂数据收集平台,是当前具身智能研究一个不可回避的问题。
2.2产品特点
2.2.1具身智能
具身智能双臂机器人能够在操作过程中实时接收和处理反馈信息,根据反馈,机械臂可以动态调整其动作和策略,从而提高任务的准确性和效率。系统允许用户通过主臂精确地控制从臂的动作,从而实现高精度的同步操作。
2.2.2人机协作
具身智能双臂机器人在设计上高度注重人机协作的安全性和易用性,采用了多种技术手段和设计策略,确保在操作过程中既能高效工作,又能保障用户的安全和便捷操作。双臂机器人配备了高灵敏度的力反馈系统,能够实时监测机械臂施加的力。当机械臂与物体或用户接触时,力反馈系统会感知外部的压力变化,并动态调整施力。通过这种机制,机器人可以避免对物体施加过大压力,防止损坏,同时确保在与用户互动时不会造成意外伤害。例如,在抓取易碎物品时,力反馈系统可以调节机械臂的力度,确保物品不被破坏。
三、产品功能
具身智能双臂数据收集平台是一款集成机械臂、末端执行器、边缘计算平台等机构形成的教学科研平台,可实现机械臂运动学、动力学、轨迹规划、视觉识别等算法功能和应用,提供例如视觉抓取,等丰富的控制案例和开放式的软件框架,支持用户针对使用场景进行特定应用开发。平台各部件尽量采用一体化集成设计,方便维护,节省空间;拥有方便易懂的人机交互界面,便于学习者能够更快的了解系统;提供多种二次开发形式,便于使用者快速利用平台适配自己的方案内容。
平台可开展虚拟仿真及真实场景实验,满足机器人操作系统及机器人运动学等课程教学实训要求,并支持专业实训、课程设计、毕业设计等实训环节的教学,契合高校机器人工程、人工智能等专业建设需求;此外,主从手机器人具备强劲综合性能和广泛适用性,内置丰富算法和软件应用,为科研人员提供了广阔的探索空间与实践载体,是科研院所开展前沿课题研究、理论实验和应用开发的首选平台。具身智能双臂数据收集平台主要具有机械臂主从控制、示教数据采集功能,能够轻松灵活地跟随使用者示教运动,并同时提供稳定的系统数据,助力客户基于具身智能双臂数据收集平台完成各场景任务。
(1)机械臂主从控制:主从机械臂都可自主操作,末端带有二指夹爪,可通过程序控制完成桌面物体拿取、放置、整理等任务。在遥操作模式下,使用者通过控制RM主机械臂,主机械臂记录关节转动数据,通过机械臂自带的透传功能,将主机械臂的数据通过10ms 的高跟随透传到从机械臂,以完成机械臂的运动映射。主机械臂末端带有夹爪控制器,可以通过夹爪控制器控制从机械臂的末端夹爪张开或闭合,使系统平台能够完成日常生活中的场景任务,并采集任务数据。在普通模式下,两套机械臂都可以单独使用。
(2)示教数据采集:在数据采集模式下,使用者操作平台完成任务时,系统会记录机械臂系统、视觉系统、移动底盘的数据,后续可以将这些数据进行训练,使机器人能够进行迁移学习,最终学会自主完成场景任务。
3.1产品优势
具身智能双臂数据收集平台同时具备商业应用、教学实训及科研实验的特性,是融合应用与科教一体的平台,因此其支持各类型高校专业实训、课程设计、毕业设计等实训环节的教学,也满足各科研院所基础实验测试及二次开发需求,实训平台主要有以下优势:
(1)多功能性:主从手机器人可以执行多种任务,包括装配、拾取、搬运等,而传统工科实训设备往往功能单一,只能完成特定的实验或操作。
(2) 智能化技术支持:主从手机器人集成了人工智能技术,例如机器视觉、深度学习及大模型等前沿技术,提升实验的智能化水平,并且对于前沿的人工智能技术具备良好的适配性,各类最新智能算法及AI解决方案能够轻松在平台上验证,对于高层次人才培养和深度科研探索有坚实的基础支撑。传统设备通常缺乏智能化支持,限制了实验的深度和创新性。
(3) 灵活性:主从手机器人的机械臂结构设计灵活,可以在不同工作场景下自由操作,适用于多种实验和项目需求。
(4) 自动化程度高:主从手机器人具备自动化控制功能,能够通过编程实现自动化操作和任务执行,提高实验效率和精度。而传统工科实训设备往往需要手动操作,效率较低且容易受到人为因素影响。
(5) 跨学科应用:主从手机器人涵盖了人工智能、控制工程、计算机等多个学科领域的知识和技术,可以为跨学科的实验和项目提供支持。传统工科实训设备往往局限于特定学科领域,无法满足跨学科教学需求。
(6) 实践创新教学:主从手机器人为学生提供了实践创新的平台,可以进行项目设计、编程控制、系统集成等实践操作,培养学生的创新能力和实践技能。传统工科实训设备往往缺乏创新性和实践性,难以激发学生的学习兴趣和动手能力。
(7) 设备迭代更新:主从手机器人采用模块化组成思想,每个组成部分都能够单独运行使用,因此后续升级与适配十分方便,用户无需整套返厂更新,使用配套器件即可更新硬件与软件。传统工科实训设备通常处于固定安装状态,设备使用效果具有“时效性”。
(8) 实训平台生态圈:主从手机器人教学科研平台提供全方位的生态圈,用户可自行定制与替换各部件,以便完成特定的场景需求,并且教学科研平台拥有独立的产品生态论坛,用户可以随时在论坛查找相关生态产品资料以及开发资料,极大地减少客户二次开发应用难度及周期。
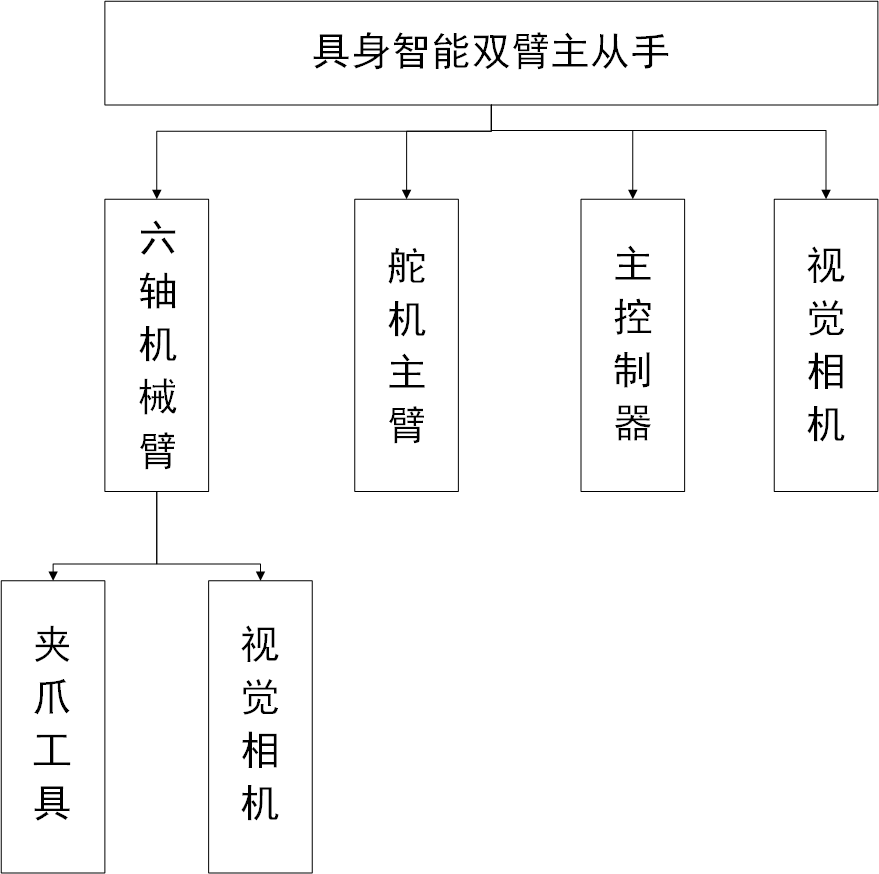
3.2系统结构图
具身智能双臂主从手结构如下图所示
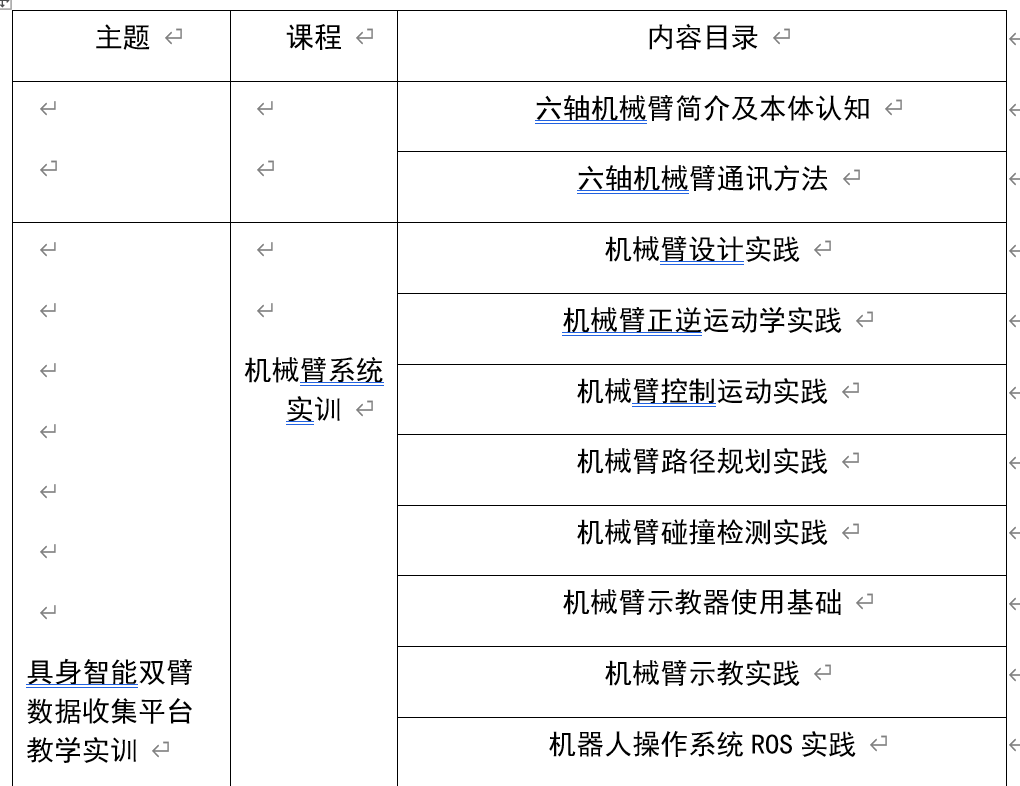
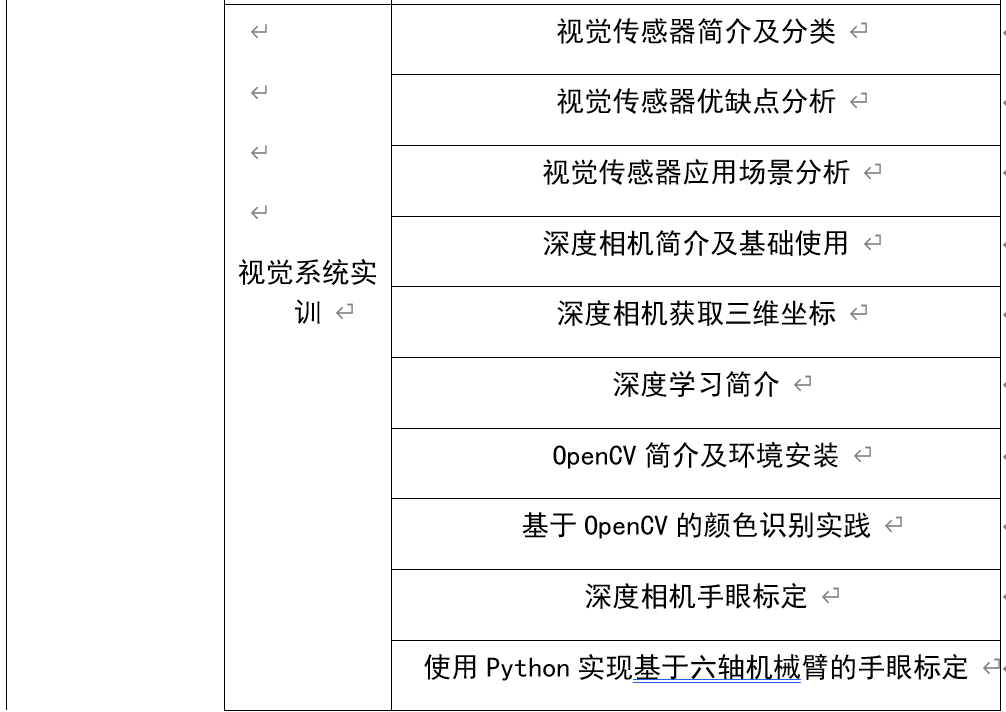
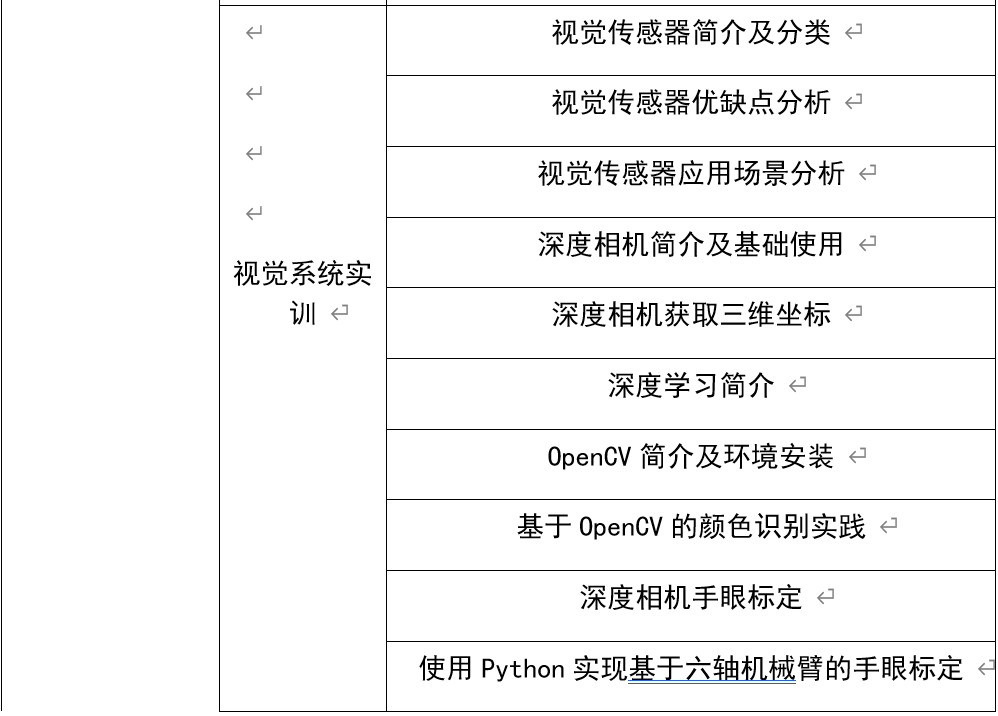
3.3实训课程
具身智能双臂数据收集平台配有丰富的实训课程,为学生提供实践创新的平台。实训课程如下:

四、分系统介绍
4.1设备组成
(1) 具身智能双臂数据收集平台主要组成部件包括:2套RM65-B-V机械臂、工控机、相机模组、遥控组件(两个同构舵机版主臂)。
(2) 机械臂系统:主机械臂采用舵机机械臂,能够实时监控关节转动数据,方便后续将数据映射给从臂。从臂采用睿尔曼 RM65 系列超轻量机械臂,负载 5kg,自重7.6kg具有超高负载自重比,无传统控制柜将控制器与机械臂完美融为一体,一体化机械臂仍自带丰富接口满足多种应用需求扩展,提供丰富的 API 函数库,便于二次开发。末端具备通用接口,灵活扩展,即插即用,一体化机械臂结构且自带丰富接口,满足多行业应用需求扩展。
(3) 视觉系统:选用 Intel Realsense D435 深度相机,可直接通过 USB3.0 供电和数据通信,能同时获取深度图像与彩色图像,有效距离 0.11m~10m,可满足视觉感知环境需求。在从臂末端关节处都安装有 Intel Realsense D435 相机,便于识别任务环境以及精确任务目标,支撑平台上也设有一个 Intel Realsense D435 相机,监控全局环境。
(4) 主控系统(自行配置):主控模块是整个系统的控制中枢,主要负责给移动底盘、机械臂及其末端执行器发送指令,同时负责机器人系统各模块间的通讯。使用者可以在此主控控制从臂以及二次开发。
(5) 电动夹爪:选取 EG2-SF16 电动夹爪,舍弃气动夹爪,符合系统设计小巧、美观的原则,避免线缆和设备过多,将执行器直接集成在机械臂末端,与机械臂完成一体化运动控制。
4.2主要技术参数
(1) 工作电压:DC24V
(2) 安全保护:碰撞检测、紧急停止等功能
(3) 对外接口:网口、USB口、WIFI、RS485
(4) 二次开发接口:C/C++、C#、Python、MATLAB、ROS、Json
4.3 六轴机械臂
机械臂采用2套睿尔曼自研的RM65-B-V,RM65-B-V 系列协作机器人系统主要由机器人本体、控制器(集成于本体基座内)、Realsense D435 深度相机和平板示教器(选配)组成。机器人本体模仿人的手臂,共有 6 个旋转关节,每个关节表示 1 个自由度。如图 5-2 所示,机器人关节包括肩部(关节 1),肩部(关节 2),肘部(关节 3),腕部(关节 4),腕部(关节 5)和腕部(关节 6)。示教器与控制器连接后,用户可控制机器人各个关节转动,使机器人末端工具移动到不同的位姿。RM65-B-V 自重 7.6Kg,额定负载 5Kg,臂展 626mm,重复定位精度±0.05mm,具有一体化结构控制器,搭载在机器人上能够完美契合“人形”的概念。其示教方式极其方便,可通过网线和 WIFI 方式连接机械臂,通过访问机械臂本体IP,即可完成示教界面的访问。

RM65-B-V机械臂参数:
(1) 控制轴数:6 轴
(2) 有效负载:5kg
(3) 机械臂净重:7.6kg
(4) 控制器:与机械臂一体化
(5) 重复定位精确度:±0.05mm
(6)有效工作半径:626mm
(7)供电电压:DC24V
(8)工作温度:0℃~45℃
(9) 工作湿度:10%~80%,且无凝露
(10) 通信接口:网口/WIFI/RS485
(11) I/O 接口:4路可复用数字IO
(12) 示教方法:平板/电脑
(13) 运动范围:关节 1 转动范围:±178°,关节 2 转动范围:±130°,关节 3 转动范围:±135°,关节 4 转动范围:±178°,关节 5 转动范围:±128°,关节 6 转动范围:±360°
(14) 关节最大速度:J1-J2 180°/s、J3-J6 225°/s
(15) 功耗:最大功耗≤200W 综合功耗≤100W
4.4深度视觉系统
深度视觉系统选用 Intel Realsense D435 深度相机,可直接通过 USB3.0 供电和数据通信,能同时获取深度图像与彩色图像,并且提供开发 SDK 和 ROS 功能包,方便使用者实时获取相机图像数据,并且兼容常见操作系统与机器人运行系统,便于使用者者快速进行二次开发。

Realsense D435深度相机主要技术参数:
(1) 环境:室内和室外
(2)深度技术:主动 IR 立体
(3)组件:英特尔® 实感™视觉处理器 D4/英特尔® 实感™模块 D435
(4)深度视野(横向×纵向×对角线):91.2°×65.5°×100.6°
(5) 深度流输出分辨率:1280×720
(6) 深度流输出帧速率:达 90fps
(7) 最小深度距离(Min-Z):0.2 米
(8) 红外信号发射器功率:可配置至达 425 毫瓦(mW)
(9) 图像传感器类型:全局快门
(10) 最大范围:10 米及更远,随校准、场景、光照条件而变
(11) RGB 传感器分辨率和帧速率:30fps 时为 1920×1080
(12) RGB 传感器视野(横向×纵向×对角线):69.4°×42.5°×77°
4.5电动夹爪
选取 EG2-SF16 电动夹爪,舍弃气动夹爪,符合系统设计小巧、美观的原则,避免线缆和设备过多,将执行器直接集成在机械臂末端,与机械臂完成一体化运动控制。该夹爪内部集成了 1 个直线伺服驱动器,用户接口采用 RS485 通信接口,内置灵敏的压力传感器,通过设置不同的压力阈值方便用户进行不同硬度物体的夹取。这款夹爪可设置爪子张合时的速度、力度、位置。其中速度设置范围为 0~255, 力度设置范围为 0~255,位置设置范围为 0~255。电动夹爪最大开口为 70 毫米,最高可实现 1.5Kg 的夹持力。

夹爪技术参数:
(1)通信接口:RS485
(2)总行程(两侧):70mm
(3)重量:231g
4.6舵机
| 舵机型号 | M29-24MB | 重量 | 102 克 |
|---|---|---|---|
| 尺寸参数 | 40x28x42.3(mm) | 传感器 | 12 位高精度磁编码 |
| 工作电压 | 9V-24V | 波 特 率 | 300~256000BpS |
| 工 作 温 度 | -2 0°~60° | 控 制 频 率 | 333Hz |
| 静态电流 | 35mA@24V | 位置分辨率 | 0.088° |
| 空载电流 | 130mA@24V | 齿轮减速 比 | 1:241 |
| 堵转电流 | 600mA@24V | 最高转速 | 102RPM |
| 堵 转 扭 矩 | 12kg.cm(1.2N.m)@24V | 额定扭矩 | 6kg.cm(0.6N.m)@24V |
| 位 置 范 围 | -360*7~360°*7 | 控制模式 | 位置伺服/电机模式 |

五、产品配置
主臂参数配置
| 序号 | 产品名称 | 规格型号 | 数量 | 单位 |
|---|---|---|---|---|
| 1 | 舵机 | SM29-24MB | 7 | 只 |
| 2 | 光电开关 | UE-13RN | 1 | 个 |
| 3 | 接口通信板 | 自制 | 1 | 个 |
| 4 | 轻触开关按键 | 圆形按键帽 | 1 | 备用 |
| 5 | 指环夹爪 | 自研(控制从臂夹爪开合) | 1 | 套 |
| 6 | 直线导轨滑块 | MGN5C-90MM | 2 | 个 |
硬件配置表如下:
|
序号 |
产品名称 | 规格型号 | 数量 | 单位 |
|---|---|---|---|---|
| 1 | 六自由度机械臂视觉版 | RM65-B-V | 2 | 套 |
| 2 | 机械臂示教器 | 配套 | 1 | 套 |
| 3 | 电动夹爪 | EG2-SF16 | 2 | 套 |
| 4 | 主机械臂(舵机) | RM60 | 2 | 套 |
| 5 | 深度相机 | Realsense D435 |
3 | 套 |
| 6 | 开关电源 | 600W | 1 | 套 |
| 7 | 固定支架 | 1m | 2 | 套 |
| 8 | 自动伸缩平衡器 | 0.6-3.0KG | 4 | 个 |
| 9 | 配套线缆航插(供电线缆、通信电缆) | 2芯、16芯 | 2 | 套 |
六、使用说明
6.1硬件安装
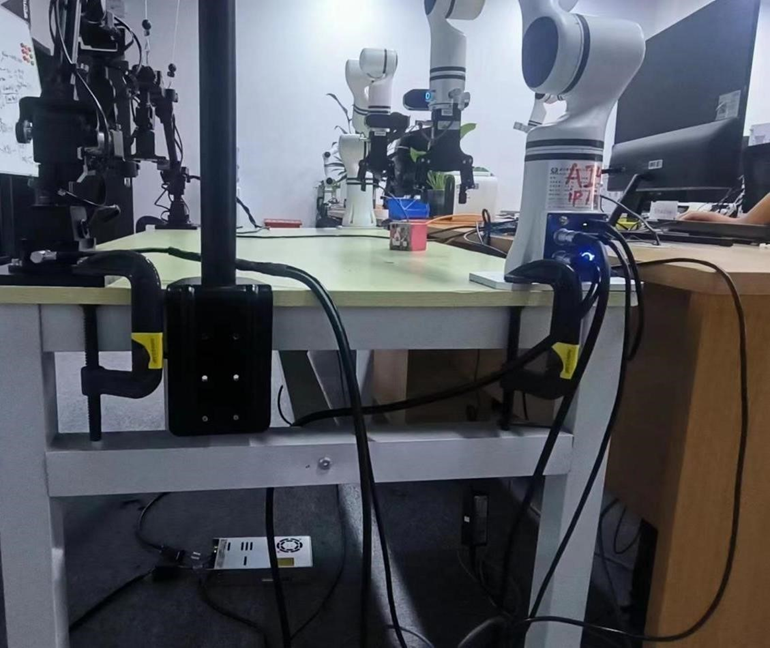
具身智能双臂数据收集平台整体安装如图所示。
步骤一:分别将舵机主臂和 RM65-B-V 从臂固定在平台两侧,两对主臂与主臂、从臂与从臂之间保持适当的距离,若距离太近,进行主从臂控制的时候,两条从臂可能产生碰撞,若距离较远,进行主从臂控制的时候,两条从臂无法进行互交。
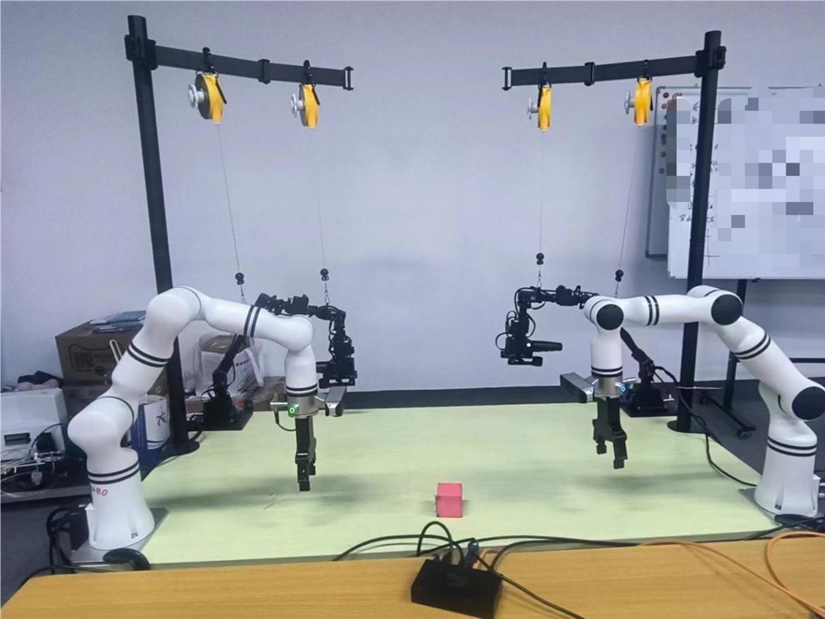
保证两条主臂和从臂的底座安装在同一直线上
步骤二:两对主臂和从臂通过16芯航插线(can接口)连接起来,再把主臂上的RS485转USB接到HUB上,从臂的USB线也接到HUB上,将HUB接到电脑主机的USB口。
步骤三:把两条从臂的网口用网线连接到交换机上,最后将交换机连接到电脑主机的网口上。


主机ip地址设置为两个从臂同一网段,保证能够ping通两个机械臂即可。
6.2安全使用注意事项
1、 行为描述:进行主从臂操作时,应考虑机械臂本体或其他物体的三维空间避让,否则可能会对机械臂造成磕碰、划伤。
应对措施:操作前应对动作进行预判,尽量避免危险动作,如无法避免,可以在初始调试时将速度调慢,留好反应时间;同时预判可能有风险发生时,应紧急停止机械臂。
2、 行为描述:使用夹爪进行物体夹取时,应保证夹取牢固,同时进行主从臂控制时,不要超过机械臂和夹爪的运动范围。
应对措施:在夹取负载时遵循设备要求,在主动或者意外断电时对末端负载进行处理。
3、 手放在遥控手柄,等待机械臂运行到与手柄位置一致,方可正常控制。当机械臂位姿与舵机位姿不符时,手持操作手柄状态下,操作手柄属于抱闸状态,待机械臂位置同步一致,解除抱闸状态。




撰写评论