

【睿尔曼-RealMan】ECO65抓取试管demo
Ron 2024-05-23
系统:Windows11
硬件设备:ECO65机械臂、钧舵夹爪×2、试管、试管架
编程语言:python3.9
编程IDE:Pycharm
SDK版本:4.2.8
第一步、硬件安装如下图所示。

图1 夹爪1
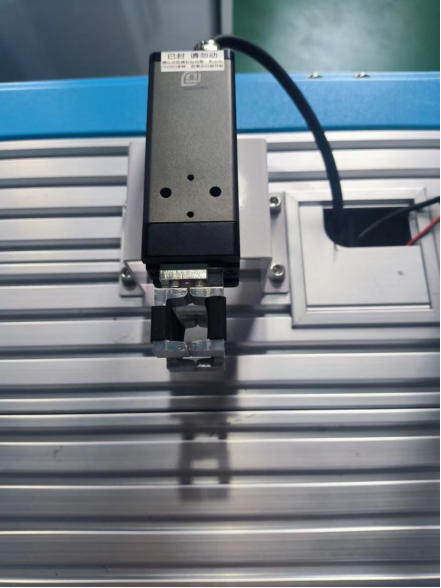
图2 夹爪2
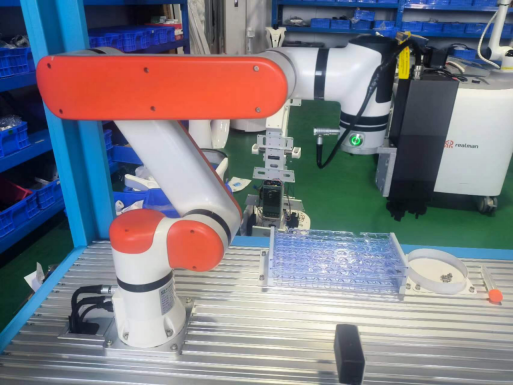
图3 ECO65
第二步、创建工程文件夹,将log_setting.py、RM_Base.dll、robotic_arm.py放到文件夹中,再新建一个py文件文件夹结构如图所示。
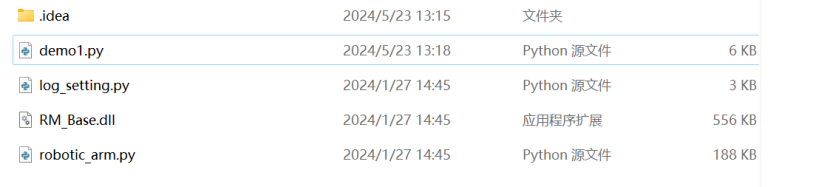
图4 文件夹结构
第三步、在demo.py编写以下程序。
import socket
import time
import json
from robotic_arm import *
port = 8080
client1 = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
# 左臂
Left = '192.168.1.18'
# 右臂
Right = '192.168.1.19'
left_robot = Arm(ECO65, Left)
right_robot = Arm(RM65, Right)
poDIAN2 = [-0.296145, -0.165672, 0.194378, 3.138, -0.004, 0]
#过渡点
poDIAN2GD = [-0.296145, -0.165672, 0.234378, 3.138, -0.004, 0]
poDIAN2H = [-0.296157, -0.165673, 0.333832, 3.138, -0.004, 0]
poDIAN4GD = [-0.359668, 0.106477, 0.205197, 3.152, -0.002, 0.047]
poDIAN4 = [-0.359674, 0.106474, 0.198199, 3.152, -0.002, 0.047]
poDIAN4H = [-0.359687, 0.106453, 0.293503, 3.152, -0.002, 0.047]
# 全局变量用于判断IO状态
IO_state_value = 0
def Robot_instruct_re(lr, instruct):
client = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
host = lr
port = 8080
client.connect((host, port))
print('Robot_right_connect--OK')
control = instruct
client.send(control.encode('utf-8'))
time.sleep(0.5)
result = client.recv(1024).decode()
print(result)
client.close()
return result
def Robot_instruct(lr, instruct):
client = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
host = lr
port = 8080
client.connect((host, port))
print('Robot_right_connect--OK')
control = instruct
client.send(control.encode('utf-8'))
time.sleep(0.5)
result = client.recv(1024).decode()
print(result)
client.close()
# 关闭socket
def Robot_close(lr):
client = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
host = lr
port = 8080
client.connect((host, port))
print('Robot_close--OK')
client.close()
# 打开socket
def Robot_open(lr):
client = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
host = lr
port = 8080
client.connect((host, port))
print('Robot_open--OK')
speed2h_4h = 100
if __name__ == "__main__":
counter = 0
# 右臂打开控制器modbus
while True:
right_robot.Set_Modbus_Mode(0, 115200, 1, True)
time.sleep(1)
# 夹爪2初始化
right_robot.Write_Registers(0, 1000, 1, [0, 0], 9, False)
time.sleep(1)
# 夹爪2上使能
right_robot.Write_Registers(0, 1000, 1, [0, 1], 9, False)
time.sleep(3)
#松开夹爪2
right_robot.Write_Registers(0, 1000, 3, [0, 9, 0, 0, 255, 255], 9, False)
time.sleep(1)
# 左臂打开末端modbus
left_robot.Set_Modbus_Mode(1, 115200, 1, True)
time.sleep(1)
# 夹爪1初始化
left_robot.Write_Registers(1, 1000, 2, [0, 0, 0, 0], 9, True)
# 夹爪1上使能
left_robot.Write_Registers(1, 1000, 2, [0, 1, 0, 1], 9, True)
# 夹爪1旋转使能
left_robot.Write_Registers(1, 1004, 4, [1, 104, 32, 32, 1, 104, 0, 2], 9, True)
# 松开夹爪1
left_robot.Write_Registers(1, 1000, 1, [1, 11], 9, False)
time.sleep(4)
# 到点2H
left_robot.Movel_Cmd(poDIAN2H, 50, 0, True)
# 到点2
left_robot.Movel_Cmd(poDIAN2, 20, 0, True)
time.sleep(2)
# 左臂夹爪1闭合
left_robot.Write_Registers(1, 1000, 1, [6, 11], 9, False)
time.sleep(3)
# 上提到点2H
left_robot.Movel_Cmd(poDIAN2H, 70, 0, True)
# 到点4H
left_robot.Movel_Cmd(poDIAN4H, speed2h_4h, 0, True)
time.sleep(2)
# 再到点4
left_robot.Movel_Cmd(poDIAN4, 40, 0, True)
time.sleep(2)
# 夹爪2闭合
right_robot.Write_Registers(0, 1000, 1, [4, 11], 9, False)
time.sleep(2)
# 夹爪1反转,拧松盖子
left_robot.Write_Registers(1, 1004, 4, [1, 104, 32, 32, -5, 104, 0, 2], 9, False)
time.sleep(1)
# 到点4GD
left_robot.Movel_Cmd(poDIAN4GD, 1, 0, True)
time.sleep(1)
# 到点4H
left_robot.Movel_Cmd(poDIAN4H, 50, 0, True)
time.sleep(1)
# 运行到点2H
left_robot.Movel_Cmd(poDIAN2H, speed2h_4h, 0, True)
time.sleep(1)
# 再到点4H
left_robot.Movel_Cmd(poDIAN4H, speed2h_4h, 0, True)
time.sleep(1)
# 再到点4GD
left_robot.Movel_Cmd(poDIAN4GD, 50, 0, True)
time.sleep(1)
# 夹爪1正转,拧紧盖子
left_robot.Write_Registers(1, 1004, 4, [1, 104, 32, 32, 3, 104, 0, 2], 9, False)
# 到点4
left_robot.Movel_Cmd(poDIAN4, 1, 0, True)
time.sleep(2)
# 松开右臂夹爪2
right_robot.Write_Registers(0, 1000, 3, [0, 9, 0, 0, 255, 255], 9, False)
time.sleep(2)
# 到点4H
left_robot.Movel_Cmd(poDIAN4H, 60, 0, True)
time.sleep(1)
# 到点2H
left_robot.Movel_Cmd(poDIAN2H, speed2h_4h, 0, True)
time.sleep(1)
# 到点2
left_robot.Movel_Cmd(poDIAN2GD, 60, 0, True)
time.sleep(2)
# 松开夹爪1
left_robot.Write_Registers(1, 1000, 1, [1, 11], 9, False)
time.sleep(1)
# 到点2H
left_robot.Movel_Cmd(poDIAN2H, 70, 0, True)
time.sleep(1)
right_robot.Close_Modbus_Mode(0,True)
left_robot.Close_Modbus_Mode(1,True)
counter += 1
print("已运行:",counter,"次") 0 条评论




撰写评论